GFORCE: Spline Coupling
This routine is used by the Romax to Adams (R2A) import process to model the Romax spline coupling component as a set of forces and torques to be transferred between two co-axial shafts. The spline coupling is the mechanical component used to transmit torque between rotating parts. It is completely unrelated to the Adams 2D/3D data spline object.
The spline coupling GFORCE statement takes the following form:
GFORCE/id, I=I_marker, JFLOAT=Jfloat_marker, RM=reference_marker,
Function= USER(I_marker, Jfloat_marker, reference_diameter, radial_clearance, transverse_backlash, radial_stiffness, tilt_stiffness, torsional_stiffness, damping, friction_coefficient),
ROUTINE = amachinery_view::spline
Function= USER(I_marker, Jfloat_marker, reference_diameter, radial_clearance, transverse_backlash, radial_stiffness, tilt_stiffness, torsional_stiffness, damping, friction_coefficient),
ROUTINE = amachinery_view::spline
where:
i_marker | = | Marker on the action part |
jfloat_marker | = | Marker (floating) on the reaction part |
reference_diameter | = | Value of the reference diameter as per standards for spline coupling such as DIN 5480, ISO 4156 or ANSI B92.2M. |
radial_clearance | = | Value of the radial clearance between the shafts |
transverse_backlash | = | Value of the backlash along the pitch/reference diameter (side clearance along pitch/reference diameter). |
radial_stiffness | = | Value of the total radial stiffness when contacting over the full length of the spline coupling |
tilt_stiffness | = | Value of the bending stiffness between the shafts |
torsional_stiffness | = | Value of the torsional stiffness connecting the shafts |
damping | = | Value of the damping coefficients of the spline coupling |
friction_coefficient | = | Value of the coefficient of friction between the spline coupling flanks used in the DIN 5466 Rating. |
The GFORCE components are calculated as below,
Result[I] = - Spring_force[I] – Damping_force[I]
The friction force considered for Z direction,
Result[3] = Result[3] - Smooth_switch * Friction_coefficient * abs(Result[6]/(reference_diameter/2))
Where:
■I range from 1 to 6 (Fx/Fy/Fz/Tx/Ty/Tz)
■Smooth_switch is based on the relative slip velocity between the two spline halves and is not binary in nature. The tanh() has been used, that allows a smooth transition between negative and positive directions.
■Relative_velocity = velocity of I part with respect to J part
■Smoothing_factor = between 0 and 1, 0 for no penetration and 1 for penetration
■Spring_force[I] = stiffness * (backlash+relative_displacement) * smoothing_factor
■Damping_force[I] = ((damping_parameter * stiffness)*smoothing_factor) * relative_velocity
Notes: | 1. The specified backlash is only used in the calculation for the radial and transverse directions. 2. Both the spring and damper forces follow a smooth transition between contact and no-contact zones as demonstrated in the illustration below. 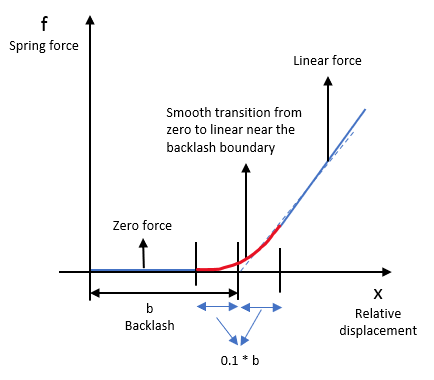 |
The following is an example of the spline GFORCE:
GFORCE/1
, I = 18
, JFLOAT = 1
, RM = 15
, FUNCTION = USER(18, 15, 0.035, 9.882407482E-05, 1.332892903E-04, 1.0E+09, 0, 1.0E+09, 0.05, 0.15)\
, ROUTINE = amachinery_view::spline
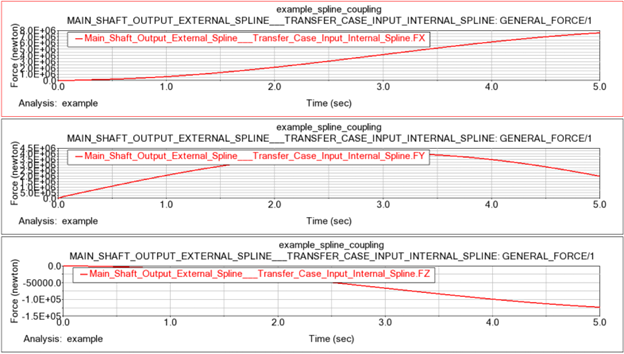
Figure 19 Example GFORCE's FX/FY/FZ output
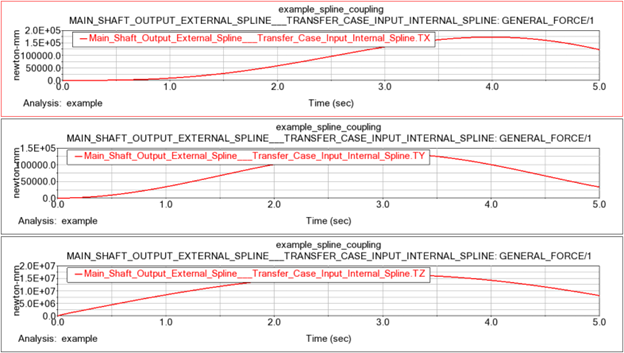
Figure 20 Example GFORCE's TX/TY/TZ output