Create/Modify Advanced 3D Gear Force
Template Builder) Build → Gears → Adams Machinery Gear → Cylindrical Gear → Advanced 3D Gear Force New/Modify
For the option | Do the following |
|---|---|
Gear Force Name | Enter the gear force name. In modify mode: Selected gear force name will be displayed. |
Fixed Orientation Gear 1/2 | The toggle fixed orientation defines the gear wheel, which is fixed for the assembly while meshing the gears. The gears are meshed at the time of force creation so that the teeth fit exactly into the design position, which should show a clearance between the teeth flanks. An internal gear will always be the reference (fixed) gear and the external gear will be rotated. In case of planetary, consequently, the planet(s) will have fixed orientation with respect to the sun. Following rules are applicable: ■At least one gear must be an external one ■The internal gear must be Gear 2 ■Gear 1 is automatically the wheel with smaller width in case of two external gears |
Flexible Gear Property File Gear 1/2 | You can either select property files (FGF and FGP) to create a GCP file. You can brows to a folder and selects the required property files. or You can select a gear force from model, which will select FGF and FGP used for the force and automatically populate the files fields. |
Modeling Option | ■RunTime ■PreComputed |
If RunTime selected, the following options will be displayed: Uses an advanced surface-to-surface contact algorithm, which delivers accurate and smooth results. The algorithm considers changing shaft positions and misalignment. The tooth flanks are described by the extruded profile including the micro-geometry. The solids for display are not used for the contact computation. The contact is checked for the left and right flanks of 5 tooth pairs. | |
Contact Overlap | Transmitted force between tooth flanks considers the flexibility of the teeth through the solution of a non-linear contact problem. The contact algorithm is of type surface-to-surface. A small relaxation by 'contact overlap' is introduced for better performance. Supported values are Small, Normal or High. Small corresponds to stiffer. The effect of this additional flexibility is small compared to the flexibility of the teeth. |
If PreComputed selected, the following options will be displayed: Offers pre-computed contact formulation delivering high performance with good results quality. In this method damping and friction are computed with simplified methods. The relative velocities in contact are evaluated only in middle plane of gear wheels. This approach can lead to noisy results under dynamic simulations; therefore adjustments for damping should be made with caution. The Friction model is reduced to 2 parametric model, with one friction coefficient and one threshold velocity. | |
Gear Contact Property File | Select created CGP file containing pre-computed contact data with Browse option. |
Precompute Now | This option is applicable when: ■You have created gear elements and hence FGF and FGP files are already created. ■You want to switch from other gear force methods to Precomputed one. ■You want to recreate GCP files for various ‘misalignments'. |
Damping Oil Rate Oil Film Thickness | The effects of hydrodynamic damping depend on gap height and squeeze velocities. The implemented damping force defined through 'damping rate oil' approximates hydrodynamic damping in function of the gap for each contact plane between the tooth flanks and the corresponding squeeze velocity. The function b is used to define the damping: b = 1.0 - gap / ( 2 * oil film thickness ) There is no hydrodynamic damping, when b < 0 Fhyd = 0 for b < 0 Hydrodynamic damping increases exponentially with decreasing oil film height. The introduction of the damping exponent d_exp is used for this purpose: Fhyd = damp rate oil * squeeze vel * bd_exp for 0 < b < 1 In case of contact (penetration), the hydrodynamic damping force is set as shown by equation: Fhyd = damp rate oil * squeeze vel for b > 1 The damping rate has always to be entered in units [N*s/mm] in this release. 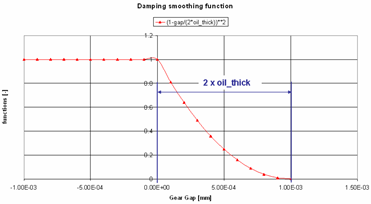 Hydrodynamic damping |
Damping Rate Structure Damping Exponent | Structural damping is usually a small value. The structural damping force is made proportional to the contact force as shown by equation: Fstruc_damp = Fcnt * damp structure * sign (squeeze vel) A value of 0.01 means that the structural damping force is 1 percent of the elastic contact force. Friction is computed for each contact plane of 'gear_1' based on the relative sliding velocity at the contact point. |
Transient Damping Damping Rate End Time | ■On ■Off Transient damping influence the resulting contact torque component about the rotational axis. Its purpose is to reduce time needed to overcome initial transient phase in dynamic simulation. The damping is proportional to angular velocity difference of ideal gear pair relative to existing one. The coefficient of proportionality and the time the damping is active can be set. The damping torque is determined with formula: delta_omega = omega_w1 - omega_w2 * N2 / N1 Tdam = delta_omega * Damping_Rate Friction effects can be turned On/Off through the toggle friction model. The static friction coefficient is usually somewhat higher than the dynamic friction coefficient. Step functions are used for smoothing the transitions. The slip velocity limits the region of sign change of the sliding velocity. The combination of very small slip velocity and high friction can reduce the performance of the integrator. You are advised to validate your selection through post-processing of the sliding velocity. Transition velocity defines the start of the region, where the dynamic friction is constant. 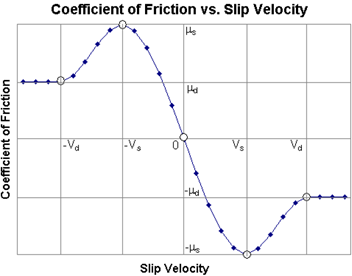 |
Friction Model | ■On ■Off |
Static Coefficient | Specifies the relative sliding velocity at which the transition between static friction and dynamic friction starts. |
Slip Velocity | Specifies the relative sliding velocity at which the transition between static friction and dynamic friction ends. |
Dynamic Velocity | Specifies the relative sliding velocity at which the transition between static friction and dynamic friction ends. |
Transition Velocity | Enter the static friction transition velocity. Adams Machinery calculates the dynamic friction transition velocity as 1.2 times this value. |
Clearance Check | Checks the clearance in the gear stage by using the shells geometries (solid) of the gear rim. If clearance - what should be the normal case - is found, it will be shown as depicted in figure. The gear solids do not include the micro-geometry. |
Force Verify  | This creates and loads automatically an Adams model with the name verify_gear_AT_model. This model allows a visual check of the profiles of the gear stage. The filled areas represent the portion of the profile between start contact and end contact. 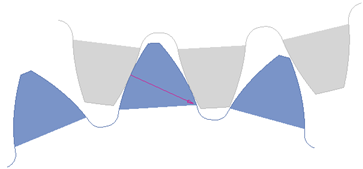 |