Create Planetary Gear (Advanced 3D Contact)
(Template Builder) Build → Gears → Adams Machinery Gear → Planetary Gear → Create/Modify
Planetary gear set is gear assembly that consists of 3 primary components. A Ring Gear (the outer most gear), 3 (or more) planetary gears that are housed by a Planetary carrier assembly (the middle gears), and a Sun Gear (the gear in the center of the gear set).
For the option | Do the following |
|---|---|
Set Name | Enter the planetary gear set name. |
Method | Advanced 3D Contact |
Construction Frame | Select the reference frame for creating gear. Gear rotation axis will be aligned with 'Z' of the reference frame. |
Symmetric | ■Yes ■No |
Property File | You can reference to available property file to specify input parameters for gear and force. |
Geometry | |
Pressure Angle (Normal) | Enter a nominal pressure angle in current modelling. Units (default value = 20.0 deg) expressed in the normal plane. |
Helix Angle | Enter a value for the helix angle (beta) in current modelling. Units expressed at the pitch circle (default value = 20.0 deg). Note that the sign of the helix angle will decide the rotation of the helicoid (right/left). |
Module (Normal) | Enter a value for the module expressed in the normal plane. |
FGF Input | Gear profile data can be migrated using .FGF. |
Sun/Ring/Planet Gear | |
General | |
Number of Teeth | Number of Teeth on Gear 1 and 2. Negative number in FGF or DAT indicates internal gear. |
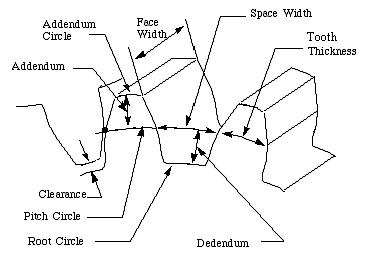
Addendum Mod.Coefficient (X) | This factor is positive, when the reference profile is moved into the direction of the tip of the tooth by the product module * factor. |
Rim/Bore Diameter | The rim diameter for an external gear and the bore diameter for an internal gear define the boundary of the gear rim. Meshing is done upto rim/bore diameter to generate .SHL file. If bore or rim diameter are specified as zero, then those are auto calculated as: Bore / rim diam = root circle diam -/+ 0.5 * module 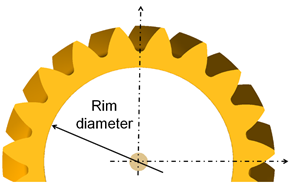 |
Gear Width | Each gear wheel has a reference marker in the middle of the gear rim with width 'w'. The z-axis of this reference marker represents the rotation axis of the gear wheel. 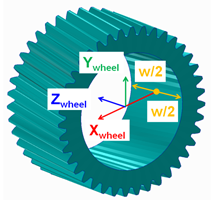 |
No. of Teeth to Export | Number of teeth for visualization (SHL geometry). The entry influence also update of inertia tensor of the gear wheel. Hence, it is advised to use 'user specified' mass properties when the number of teeth exported are different than actual. |
Geometry File | User specified geometry file import for visualization. Mesher generates a .shl file for gear. |
Tooth Profile | |
Tooth Flank | |
Tip Chamfer Length Factor | The angle of the chamfer is calculated in such a way, that the inclination between involute and chamfer and between tip radius and chamfer is equal. The intersection of the chamfer with the involute defines 'end contact'. 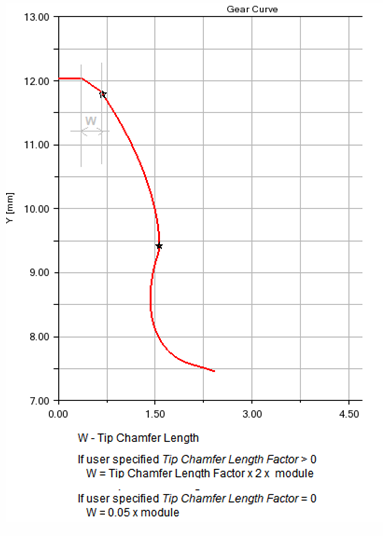 |
Tip Fillet Radius | If the input is greater than zero, a radius is created and an eventually Tip Chamfer defined above is ignored. The fillet is tangent with the 'end contact'. |
Root Fillet Radius Factor | This factor multiplied by the normal module delivers the fillet radius at tooth root. The intersection with the involute defines Start Contact. |
Addendum Mod. Factor | The tooth tip height results from the multiplication of the 'normal module' by this factor. The height is measured from the pitch circle. |
Dedendum Mod. Factor | The tooth root height results from the multiplication of the 'normal module' by this factor. The height is measured from the pitch circle. |
Cutter Rack | |
Tip Clearance Factor | The factor multiplied by normal module delivers the additional clearance, which is an outcome of the increased rack tip height |
Protuberance Radius | The radius at the tip of the protuberance tool. 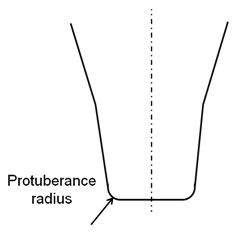 |
Protuberance Length | Length measured from Rack Tip as shown: 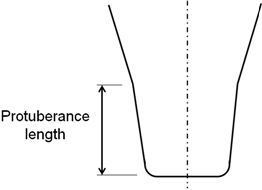 |
Protuberance Angle | The angle of the protuberance is measured against the symmetry plane of the tooth on the rack. 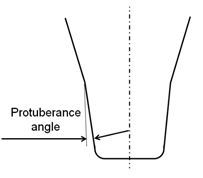 |
Protuberance Thickness | This thickness can be used to simulate the grinding tool, which is removing material from the tooth flanks produced by the rack. 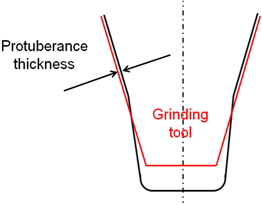 |
Involute | |
Barreling Coefficient | The involute modifications support barreling applied to left/right flank as shown below: 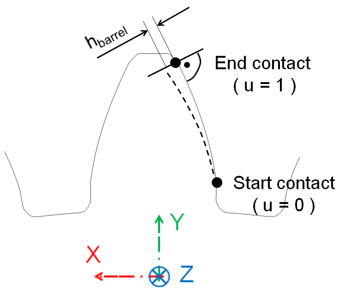 Barreling (hbarrel) is defined as a cubic function of the dimensionless variable u (in radial direction) through equations: u = ( radius - radiusstart ) / (radiusend - radiusstart) hbarrel = a1 * u + a2 * u**2 + a3 * u**3 |
Involute Slope | The involute slope is also applied to the left and to the right flank. The slope is defined through the angle  involute. The angle is positive in material-in wise direction as shown below (right flank): involute. The angle is positive in material-in wise direction as shown below (right flank):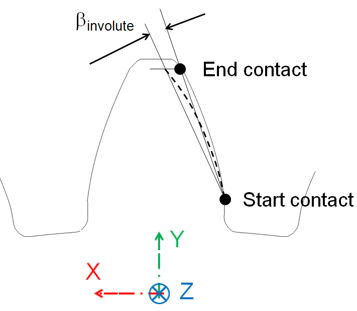 |
Tooth Modification | |
Tip and Root Modification | |
Tip Relief Coeff. | Tip Relief Length and Root Relief Length define the diameter, where the relief starts. Tip and Root relief modifications can be applied for the left and/or the right flank. Both reliefs are defined by a cubic polynomial htip = a1 * utip + a2 * utip**2 + a3 * utip**3 hroot = b1 * uroot + b2 * uroot**2 + b3 * uroot**3 where, dimensionless variables utip and uroot are: utip = (diameter - tip_relief_length ) / ( diameter_end_contact - tip_relief_length ) uroot= (root_relief_length - diameter) / ( root_relief_length - diameter_start_contact) 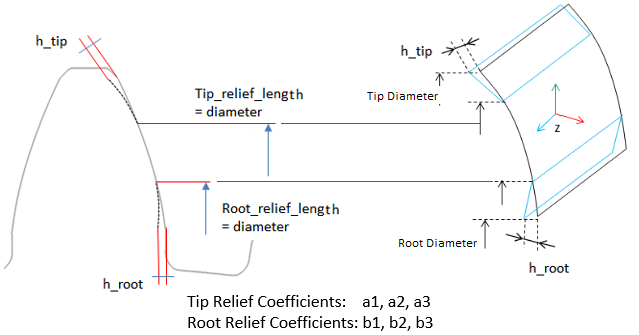 |
Tip Relief Lengh | |
Root Relief Coeff. | |
Root Relief Length | |
Lead Modification | |
Crowning Coefficients | Crowning is applied in a plane xp-zp, which is perpendicular to the contour of the tooth. Crowning hcrown is defined as a cubic function of a dimensionless variable u. 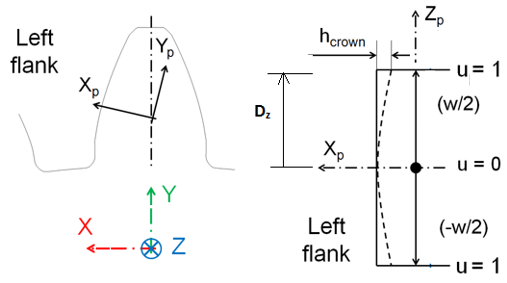 The dimensionless variable u follows from equation: u = |zp| / (w/2) The cubic polynomial is given in equation hcrown = a1 * u + a2 * u**2 + a3 * u**3 Following equation gives the relation between the crowning drop hcrown and crowning radius R. R = ( (w/2) **2 + hcrown**2 ) / ( 2 * hcrown) Generally hcrown is very small compared to the width of the rim; so equation below should be a valid approximation for a circular crowning: a2 = hcrown; a1 = a3 = 0.0 Crowning h1 at u=u1 ( u1 > 0.0 and u1 < 0.0) and h2 at u=1.0 with no slope at u=0 is defined by the coefficients of equations: a1 = 0 a2 = ( h1 - h2 * u1**3 ) / ( u1**2 - u1**3 ) a3 = ( h2 * u1**2 - h1 ) / ( u1**2 - u1**3 ) |
End Relief +ve Length | The relief lengths lpos and lneg define the width, where the modification is applied. A dimensionless variable u is introduced to facilitate input for the end relief modifications: 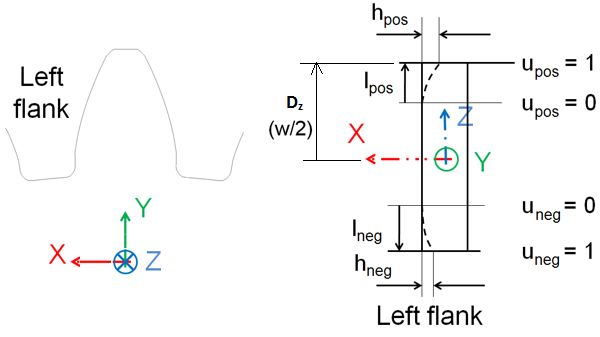 Following equations show the dimensionless variable u. upos = ( zrim - ( gear_width/2 - lpos ) ) / lpos uneg = ( |zrim| - ( gear_width/2 - lneg ) ) / lneg In correlation with crowning, a cubic polynomial from equations below defines the relief. hpos = b1 * u + b2 * u**2 + b3 * u**3 hneg = b1 * u + b2 * u**2 + b3 * u**3 Equations below give the relation between the end reliefs hpos and hneg and a corresponding radius. Rpos = ( (lpos**2 + hcrown**2 ) / ( 2 * lpos ) Rneg = ( (lneg**2 + hcrown**2 ) / ( 2 * lneg ) Generally the relief is small compared to the length of the relief, what allows to approximate the radius by equations b2pos = lpos ; b1 = b3 = 0.0 b2neg = lneg ; b1 = b3 = 0.0 Relief h1 at u=u1 ( u1 > 0.0 and u1 < 0.0) and h2 at u=1.0 with no slope at u=0 is defined by the coefficients of equations: b1 = 0 b2 = ( h1 - h2 * u1**3 ) / ( u1**2 - u1**3 ) b3 = ( h2 * u1**2 - h1 ) / ( u1**2 - u1**3 ) |
End Relief +ve Coeff. | |
End Relief -ve Length | |
End Relief -ve Coeff. | |
Lead Slope | The lead slope  (in degrees) defines a correction with respect to the helix angle as seen in figure below: (in degrees) defines a correction with respect to the helix angle as seen in figure below: 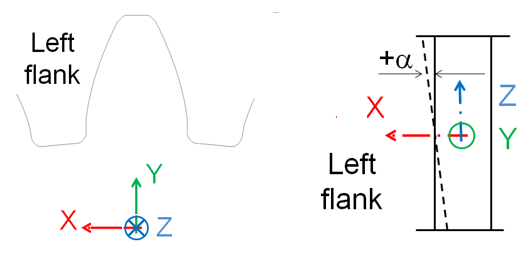 The principles for lead modifications are identical between left and right flank. The only point of attention is the definition of the lead slope as shown as: 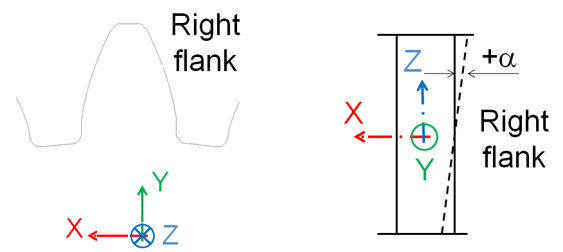 |
Mesh | |
Mesh Density | Mesh density defines the number of finite elements along the contact line. 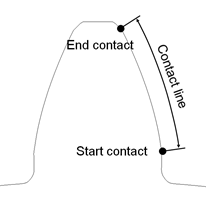 The contact line represents the portion of the profile (flank), where contact is supported. The contact line is defined through start contact and end contact: Start contact is close to the root for external and internal gears. Valid input entries for mesh density are 1 to 5, meaning 16,24,32,40 or 48 elements along the contact line. This input parameter allows the user to select his preference with respect of accuracy versus CPU-time. A low value for mesh density will result in a coarser Nastran model, what gives generally a short CPU-time. One has to keep in mind, that a coarse model is generally slightly stiffer. The accuracy of the contact computations in Adams by the Gear AT force is not influenced strongly in quality and in CPU-time by mesh density, as the contact algorithm uses an accurate definition of the tooth flank surface. It is recommended that both meshing gears should have same mesh density. |
No. of Contact Planes | The integer value of number of contact planes divides the width of a tooth into a number of equidistant sections in lead direction. It is suggested, number of contact planes should be same on both gears in mesh. Contact between gear wheels is checked at each 'contact plane' of wheel 1 of the Gear AT force. A too small number of contact planes may be leading to some numerical noise. CPU time increases with increasing number of contact planes. The user has to verify the appropriateness of his selection. Following default values are implemented: u = width / ( 2 * module * 10 ) number contact planes = 20 * ( 1 - u ) + 30 * u |
Load Element Size | Load Element Size defines the number of finite elements in lead direction per section. The length of the section is given by 'width' divided by 'number of contact planes'. 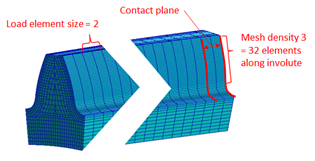 A larger number of this input will increase the size of the FE-mesh and hence the CPU-time of the Nastran analysis. |
Display Ratio Lead | The SHELLs are used for the display only; they are not used for any contact simulation. The input for Display Ratio Lead defines number of divisions for Shell geometry in lead direction as a fraction of contact planes number. Value 2 means half the number of divisions to the number of contact planes. 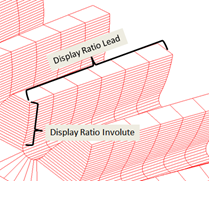 |
Display Ratio Involute | The SHELLs are used for the display only; they are not used for any contact simulation. The input for display ratio involute defines number of divisions for shell geometry in involute direction as a fraction of contact elements number defined by mesh density. Value 2 means half the number of divisions to the number of contact elements. |