Create Tensioner - Connection
Machinery → Create Pulley
For the option | Do the following |
|---|---|
Tensioner Connector | ■Yes - "Revolute" or "Translation" joint will be provided along with "SFORCE" depending on the tensioner type selected between tensioner and attachment part. ■No - Only "SFORCE" will be provided between the tensioner and attachment part and there will be no joint created. |
If Yes is selected the Body options will be available: | |
Body | ■Existing ■ground ■Ground |
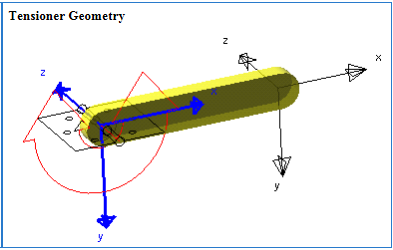
Rotational/Translational Tensioner The following torque function defines the rotational spring-damper: T = Preload - az * Stiffness - wz * Damping where: ■az = Angular displacement ■wz = Angular velocity The following force function defines the translational spring-damper: F = Preload - dz * Stiffness - vz * Damping where: ■dz = Translational displacement ■vz = Translational velocity | |
Stiffness | ■Rotational Enter the stiffness of the rotational spring-damper. The stiffness is in force units * length units/angle units. ■Translational Enter the stiffness of the translational spring-damper. The stiffness is in force units per length units. |
Damping | ■Rotational Enter the damping coefficient of the rotational spring-damper. The damping is in force units * length units * time units per angle units. ■Translational Enter the damping coefficient of the translational spring-damper. The damping is in force units * time units per length units. |
Preload | ■Rotational Enter the preload of the rotational spring-damper. The preload is in force units * length units ■Translational Enter the preload of the translational spring-damper. The preload is in force units. |