Simplified Gear Method
Introducing Adams Machinery Gear's Simplified Gear Method
The Machinery Gear's simplified gear module calculates the gear forces for spur, helical, bevel, worm, rack and hypoid gears. The contact routine consists of two major parts, the backlash calculation and the gear force calculation. The Adams Machinery Gear's Simplified Gear Module is very computationally efficient and therefore suitable to use in complex gear applications like complete manual and automatic gearboxes. The gear force is modeled with an Adams GFORCE.
Backlash
The backlash law is defined with a combination of ATAN functions to guarantee smoothness and derivative continuity. The equation of the elastic portion of backlash function can be seen below:
 | (1) |
Where:
■Telastic = Elastic torque portion of the backlash torque
■sharp = Sharpness factor of the backlash. It let you control how sharp the transition is between the lash region with zero forces and the stiff region.
■α = Relative angles of the two markers defining the backlash force
■lash = Backlash (in radians in equation but can be entered as length unit in dialogbox)
■k = Rotational stiffness of the gear-to-gear contact
In the plot below, the following parameter settings were used:
■k = 5.73e6 Nmm/rad
■lash = 0.0174 rad
■sharp = 100, 250, 500, 1000 and 5000
Backlash Force as Function of Sharpness Factor (Sharp=100, 250, 500, 1000, 5000)
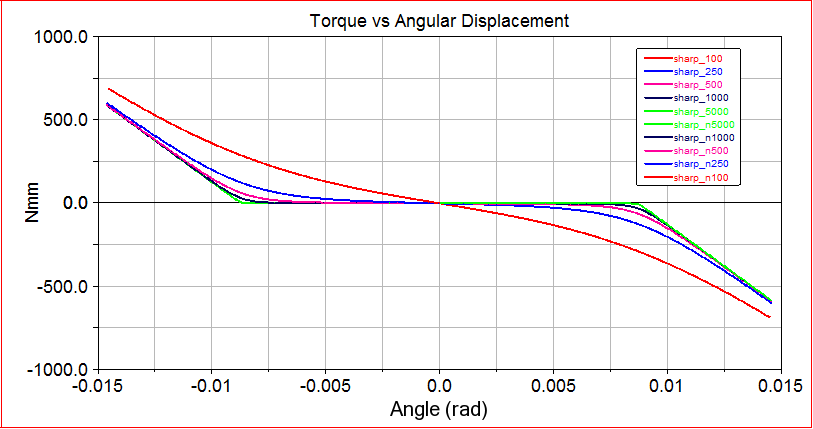
Figure 9 Torque vs Angular Displacement
The corresponding plot for the rotational stiffness is presented below:
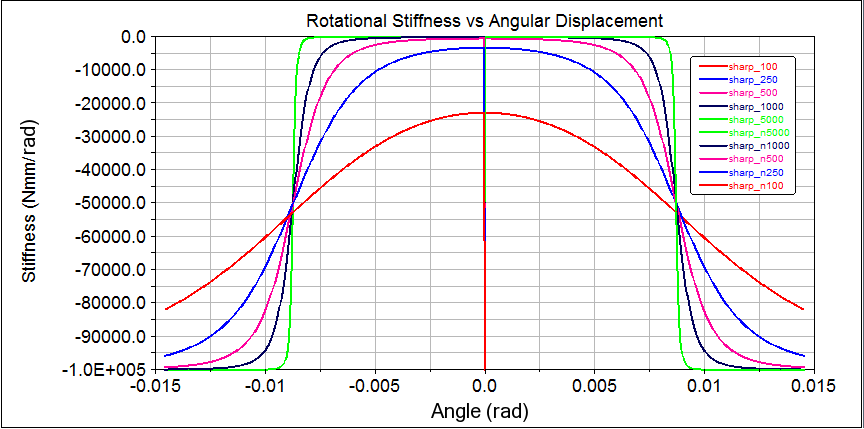
Figure 10 Rotational Stiffness vs Angular Displacement
To calculate a viscous damping torque, the ratio between the local and the maximum stiffness values are used to scale the damping coefficient value. This means that in the backlash region, the damping coefficient is less compare to the value when the gear contact is fully developed, see equation below:
 | (2) |
where:
■Tdamping = Damping torque portion of the backlash torque
■damping_ratio = Viscous damping ratio. Visous damping = damping_ratio * local_stiffness
■local_stiffness = The local rotational stiffness as shown in plot above.
■ = Rate of change of relative angles of the two markers defining the backlash force
= Rate of change of relative angles of the two markers defining the backlash force
= Rate of change of relative angles of the two markers defining the backlash forceThe resulting total backlash torque is the sum of the elastic and damping backlash torque:
 | (3) |
Last, in order to get a smoother start of the simulation, the sharpness factor specified is a steady state value in the sharpness function that is dependent on time. The sharpness function equation is shown below:
 | (4) |
Where backlash_smoothing_time is the time to fully achieve from zero to user entered backlash value.
This means that the backlash needs some time to be fully developed with the steady-state value of Sharp*, see plot below:
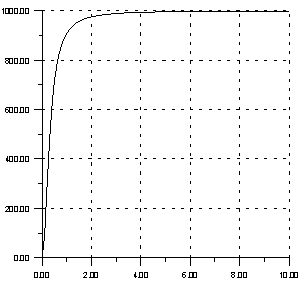
Figure 11 Sharpness Factor Development Time
Important: | The involute definition is not applicable to the simplified method spur gear type. However, if you edit the parameter with individual gear modify dialog box then this option will appear. |
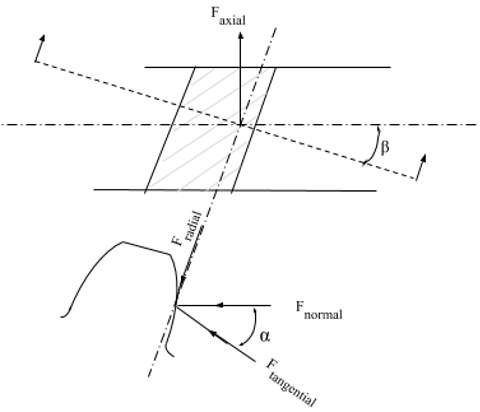
Simplified Helical Gear Force
The gear components for helical gears with friction force neglected and contact simplified to one contact position, is shown in equations below. The Force FT is the resulting contact force in the Transversal plane along the line of action. FNormal is the resulting force in the Normal plane. For spur gears, FT = FNormal. All gear force components are presented in picture below. (This also applies to rack and pinion gear)
 | (5) |
 | (6) |
 | (7) |
 | (8) |
Where:
■T = Backlash torque
■rb = Base radius of the gear
■αwt = Pressure angle in transversal plane (at working pitch radius)
■βb= Helix angle at base radius
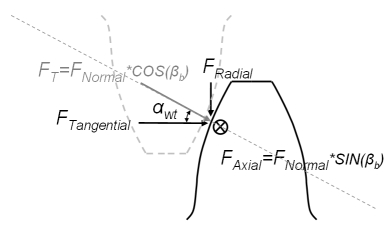
Figure 12 Tooth force components in Spur/Helical Gear
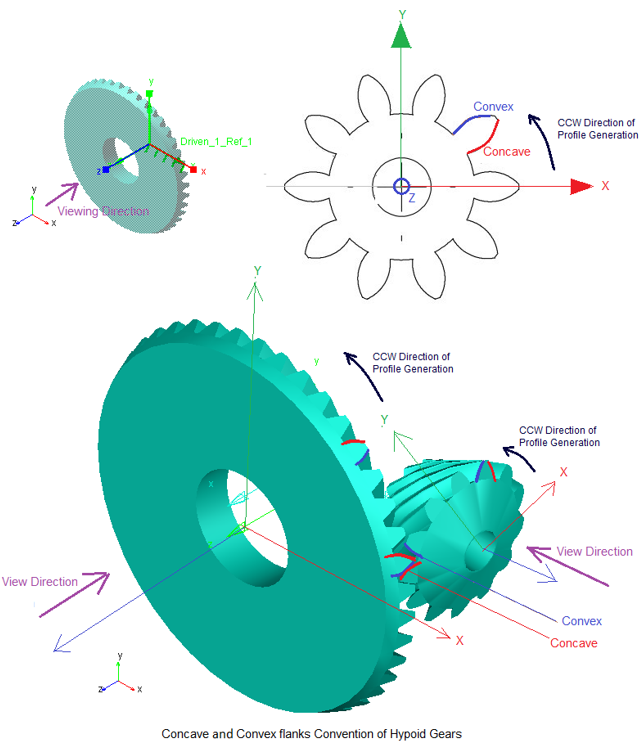
Simplified Bevel/Hypoid Gear Force
The gear components for bevel/hypoid gears with friction force neglected and contact simplified to one contact position, is shown in equations below. The Force FT is the resulting contact force along the line of action. See other gear force components in the picture below
FORCE_FT = DRIVING_TORQUE / BASE_RADIUS
(Tangential Force = Total Driving Torque / Base Radius at mean)
 | (9) |
 | (10) |
 | (11) |
 | (12) |
Where:
■T = Backlash torque
■rb = Base radius of the bevel gear at mean cone distance, Rm
■rb = rp * cos(Pressure_angle_transverse)
■rp = sin(pitch_angle)*mean_cone_distance
■ = Mean spiral angle at base radius
= Mean spiral angle at base radius
= Mean spiral angle at base radius■ = tan-1(tan(mean_spiral_angle)*cos(Pressure_angle_transverse))
= tan-1(tan(mean_spiral_angle)*cos(Pressure_angle_transverse))
= tan-1(tan(mean_spiral_angle)*cos(Pressure_angle_transverse))■αt = Pressure angle transverse
■For Dual Pressure Angle Hypoid

 or
or  is decided based on active flank. Active flank in turn is decided by sign_factor of penetration.
is decided based on active flank. Active flank in turn is decided by sign_factor of penetration. GEAR RATIO = Z2/Z1
PENETRATION = GEAR_AZ * RATIO + PINION_AZ
■δ = reference cone angle
■sign_factor is 1 if gear 1 is the driving member else it is set to -1.
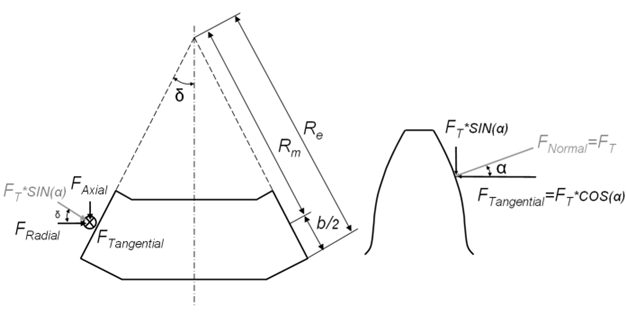
Figure 13 Tooth force components in a straight Bevel Gear (spiral angle = beta=0)
■b = Face width
■Re = Outer reference cone distance
■Rm = Mean cone distance = Re - b/2
Simplified Worm Gear Force
The force Ft is transverse force acting on worm wheel.
 | (13) |
 | (14) |
 | (15) |
 | (16) |
Where:
■T = Backlash torque
■rb = Base radius of the bevel gear at mean cone distance, Rm
■rb = rp * cos(Pressure_angle_transverse)
■rp = worm wheel pitch radius
■ = Helix angle at base cylinder of worm wheel
= Helix angle at base cylinder of worm wheel
= Helix angle at base cylinder of worm wheel■ =
= 
= ■αt = Pressure angle transverse
■ = Worm wheel helix angle
= Worm wheel helix angle
= Worm wheel helix angleConsidering Friction Force
Total Tangential force = Frtangential = Ftangential + Frt
Total radial force = Frradial = Fradial + Frr
Total axial force = Fraxial = Faxial + Fra
Frt = Ffric * VPF1
Frr = Ffric * VPF2
Fra = Ffric * VPF3
where:
Ffric = -FT * f1 *f2
f1 and f2 are calculated using STEP function as:
STEP(VSURF, -Vstat_friction, -1, Vstat_friction, 1, 0, f1, ERRFLG)
STEP(VSURF, Vstat_friction, stat_friction, Vdyn_friction, dyn_friction, 0, f2, ERRFLG)
and
VSURF = SQRT((vpf1)2 + (vpf2)2 + (vpf3)2)
vpf12 = v1 + fv * Ftangential
vpf22 = v2 + fv * Fradial
vpf32 = v3 + fv * Faxial
fv = (v1 * (Ftangential) + v2 * (Fradial) + v3 * (Faxial)) / ((Ftangential)2 + (Fradial)2 + (Faxial)2)
with
v1 = wormwheel_ang_vel * wormwheel_pitch_rad + vx_diff_worm&wormwheel
v2 = 0
v3 = worm_ang_vel * (skew_line_axle_dist - wormwheel_pitch_rad) + vz_diff_worm&wormwheel