POLY
The POLY function evaluates a standard polynomial at a user-specified value x.
Format
POLY (x, x0, a0, a1,..., a30)
Arguments
x | A real variable that specifies the independent variable. For example, if the independent variable in the function is time, x is the system variable TIME. |
x0 | A real variable that specifies a shift in the polynomial. |
a0, a1,..., a30 | The real variables that define as many as thirty-one coefficients for the polynomial series. |
Extended Definition
The POLY function evaluates a standard polynomial at a user-specified value x. x0, a0, a1,..., a30 are parameters used to define the constants for the polynomial. The standard polynomial is defined as:
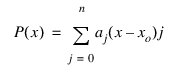

The index j has a range from zero to n, where n is the number of terms in the series.
Examples
MOTION/1, JOINT=21, TRANSLATION
, FUNCTION=POLY(TIME, 0, 0, 0, 1)
, FUNCTION=POLY(TIME, 0, 0, 0, 1)
This MOTION statement uses a quadratic polynomial function with respect to the system variable TIME to define a motion. That expanded function is:
Poly = time2
MOTION/1, JOINT=21, TRANSLATION
, FUNCTION = IF(TIME-5: 0, 0, POLY(TIME, 5, 0, 10))
, FUNCTION = IF(TIME-5: 0, 0, POLY(TIME, 5, 0, 10))
This MOTION statement uses an arithmetic IF in its function expression to switch between functions.
The expanded function is:
if (time <= 5) then Poly=0
else Poly=10*(time-5)
else Poly=10*(time-5)
SFORCE/3, I=10, J=20, TRANSLATION
, FUNCTION=-POLY(DM(10, 20), 10, 0, 25, 0, 0.75)
, FUNCTION=-POLY(DM(10, 20), 10, 0, 25, 0, 0.75)
This SFORCE statement defines a force with a nonlinear force deformation characteristic. This relationship is:
Poly=-25*[DM(10,20)-10]- 0.75*[DM(10,20)-10]3
where, DM(10,20) represents the magnitude of the displacement of Marker 10 with respect to Marker 20. The free length of the spring is 10 units.
See other Miscellaneous Adams intrinsic functions available.