VR
The VR function calculates the radial (separation) velocity of marker i with respect to marker j. The vector time derivative is taken in the reference frame of marker l. Markers j and l default to the global coordinate system if they are not specified.
Format
VR(i[,j][,l])
Arguments
i | The marker whose velocity is being measured. |
j | The marker with respect to which the velocity is being measured. Set j = 0, while still specifying l, if you want j to default to the global coordinate system. |
l | The reference frame in which the time derivative of the displacement vector is taken. Set l = 0 or omit the argument if you want the time derivatives to be taken in the ground coordinate system (GCS). |
Extended Definition
Mathematically, VR is calculated by projecting the velocity vector on a unit vector along the line of sight between i and j, as follows:
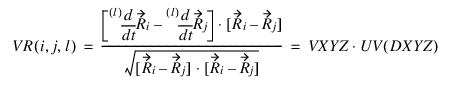
where:
■ is the displacement of marker i with respect to the global origin.
is the displacement of marker i with respect to the global origin.
is the displacement of marker i with respect to the global origin. ■ is the displacement of marker j with respect to the global origin.
is the displacement of marker j with respect to the global origin.
is the displacement of marker j with respect to the global origin. As markers i and j separate from each other, VR is positive. VR is negative when markers i and j approach each other.
Although the VR function accepts an l argument as the reference frame in which the time derivative is taken, it is invariant of the coordinate system in which it is computed.
The VR function is actually the time derivative of the invariant DM function, which can be seen as follows:

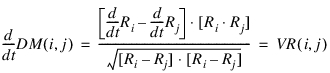
This is useful to know when using DM and VR together as the displacement and velocity terms in an SFORCE. Please see the SFORCE statement for an example.
Examples
SFORCE/1, TRANSLATION, I=467, J=764
, FUNCTION=-10*VR(467,764)
, FUNCTION=-10*VR(467,764)
This SFORCE statement defines a translational damper with a damping constant of 10.
See other Velocity measures available.