c_get_linear_mat_states
The c_get_linear_mat_states () utility subroutine is exclusively used inside a CONSUB user-written subroutine. This will carry out the linear analysis and generate output for the state vector information, the numerical values of the state vector and the ABCD matrices if available. The c_get_linear_mat_states () subroutine has a C/C++ only implementation; there is no FORTRAN equivalent. The c_get_linear_mat_states () utility subroutine is supported only by Adams Solver C++.
Use
Called by
CONSUB
Prerequisite
None
Function Prototype
void c_get_linear_mat_states(struct sAdamsLinearDataIn *dataIn, struct sAdamsLinearDataOut *dataOut, int *type);
Calling Sequence
c_get_linear_mat_states(dataIn, dataOut, type);
Input Arguments
dataIn | Pointer to a data structure that holds the input parameters. The input parameters are seven integers dataIn->PINPUT dataIn->POUTPUT, dataIn->PSTATE, dataIn->RM, dataIn->NODAMPIN, dataIn->ORIGINAL, dataIn->USEPBCS. The first six integers share the same meaning with the arguments in LINEAR/STATEMAT command. Any none zero integers set to dataIn->NODAMPIN, dataIn->ORIGINAL and data->USEPBCS will turn these options ON. To turn these options OFF, one can simply set their values to be 0. The USEPBCS option is used to define the linearization coordinate system to be PBCS (ON) or BCS (OFF). All the entries of this data structure must be initialized before calling this utility routine. |
type | An integer pointer indicates the action taken by the utility routine. *type = 1 initialize the dataOut data structure. *type = 0 carry out the linear analysis and store the data in dataOut *type = 5 clean up the memory |
Output Argument
dataOut | Pointer to a data structure that holds the output information which are dataOut->NS Integer, number of states dataOut->NI Integer, number of inputs dataOut->NO Integer, number of outputs dataOut->ND Integer, number of differential states dataOut->NK Integer, number of kinematic states dataOut->A double pointer to an array with the size of NS*NS stored in column order dataOut->B double pointer to an array with the size of NS*NI stored in column order dataOut->C double pointer to an array with the size of NO*NS stored in column order dataOut->D double pointer to an array with the size of NO*NI stored in column order dataOut->STATESINFO double pointer to an array with the size of NS*3 stored in column order dataOut->STATES double pointer to an array with the size of NS stored as  Where xi stands for a position state, vi stands for the corresponding time derivative, and zi stands for a differential state in the model. |
Cautions
c_get_linear_mat_states utility routine must be initialized with *type = 1 before carrying out the linear analysis.
Note
Turning the USEPBCS option ON is equivalent to setting the environment variable MSC_LINEAR_PBCS_STATES to any value. However, the later environment variable setting will supersede the USEPBCS option.
Example:
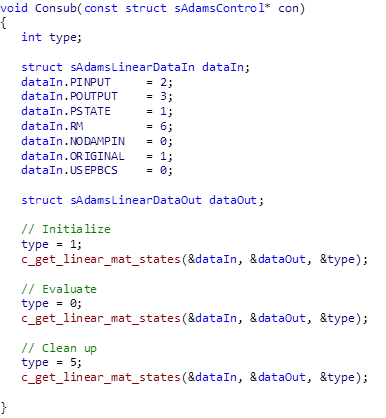
In this example, we presented a code snippet where the linear utility routine is called from a CONSUB with the PINPUT = 2, POUTPUT = 3, PSTATE =1 and RM=6. The NODAMPIN and USEPBCS options are turned OFF and the ORIGINAL option is turned ON. The ABCD matrices, states vector info and the numerical values of the states are stored in the dataOut.
For examples of how to use the c_get_linear_mat_states() utility, see the following files:
■For Windows, in the directory /install_dir/solver/samples, where install_dir is the directory in which you installed your Adams software.
■For Linux, in the directory /install_dir/solver/samples, where install_dir is the directory in which you installed your Adams software.
♦linear_utility.acf
♦linear_utility.adm
♦linear_utility.c