ORI_RELATIVE_TO
Returns an orientation of a coordinate system object as specified by an angle. This parametric representation of ORI_RELATIVE_TO maintains the relationship regardless of how other objects are moved.
This function is shorthand for ORI_ORI (Orientation, Frame Object, To Frame Object) where the To Frame Object is the underlying parameter. The underlying parameter determines the proper coordinate system object for the transformations.
Format
ORI_RELATIVE_TO (Body 313 Rotations, Frame Object)
Arguments
Body 313 Rotations | Array of body-fixed 313 Euler rotations. |
Frame Object | Coordinate system object in which each sequence in angle is expressed. |
Example
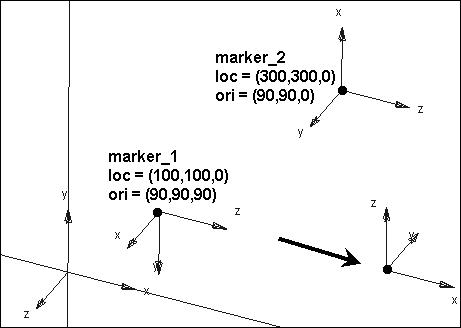
The following example illustrates the use of the ORI_RELATIVE_TO function:
Function | ORI_RELATIVE_TO({marker_1.orientation}, marker_2) |
Result | 180, 90, 180 |