Difference between angular acceleration vectors (WDTXYZ)
The WDTXYZ measure returns the difference between the angular acceleration vector of marker i and the angular acceleration vector of marker j resolved in the coordinate system of marker k. All vector time derivatives are taken in the reference frame of marker l.
Format
WDTXYZ(i[,j][,k][,l])
Arguments
Applied To Marker (i) | The marker whose acceleration is being measured. |
Applied From Marker (j) | The marker with respect to which the angular acceleration is being measured. If j is not specified, it defaults to the global origin. Specify j = 0 if you want to use this default, and then specify k or l. |
Along Marker (k) | The marker in whose coordinate system the angular acceleration vector is being expressed. If not specified, k defaults to the global coordinate system. Specify k = 0 if you want to use this default, and then specify l. |
Reference Frame (l) | The reference frame in which the first time derivative of the angular velocity vector is taken. Set l = 0 or omit the argument if you want the time derivative to be taken in the global reference frame. |
Extended Definition
Mathematically, WDTXYZ is calculated as:
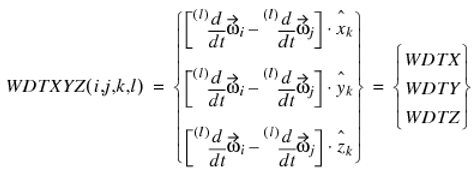
where:
■ is the angular velocity vector of marker i in ground.
is the angular velocity vector of marker i in ground.
is the angular velocity vector of marker i in ground.■ is the angular velocity vector of marker j in ground.
is the angular velocity vector of marker j in ground.
is the angular velocity vector of marker j in ground.■ denotes time differentiation in the reference frame of the l marker.
denotes time differentiation in the reference frame of the l marker.
denotes time differentiation in the reference frame of the l marker.■WDTX is the Angular Acceleration About X (WDTX) measure.
■WDTY is the Angular Acceleration About Y (WDTY) measure.
■WDTZ is the Angular Acceleration About Z (WDTZ) measure.
■ is the unit vector along the x-axis of marker k.
is the unit vector along the x-axis of marker k.
is the unit vector along the x-axis of marker k.■ is the unit vector along the y-axis of marker k.
is the unit vector along the y-axis of marker k.
is the unit vector along the y-axis of marker k.■ is the unit vector along the z-axis of marker k.
is the unit vector along the z-axis of marker k.
is the unit vector along the z-axis of marker k.Examples
A vector expression for angular acceleration might be used directly in the definition of a vector torque element:
VTORQUE/3, I=310, JFLOAT=9911, RM=310,
, TXYZ = -6.*WDTXYZ(310,9900,310)