Frequency Bushing
Component Name
ac_frequency_bushing
Description
This component is based on a GFORCE element. The damping coefficients of the GFORCE are interpreted as the loss angles. The forces in the x- and y-plane and the moments along the x- and y-axis are interpolated elliptical. The z force and moment are mapped directly from the splines.
Similar to the standard bushing in Adams Car (ac_bushing) linear bushing property files can be defined to account for compliance in the I part and J part.
Specification
.ARIDE.attachments.ac_frequency_bushing
Parameters
Parameter: | Type: | Function: |
|---|---|---|
property_file | string variable | name of property file |
property_file_I | string variable | name of property file for the I part compliance |
property_file_J | string variable | name of property file for the J part compliance |
t_preload_x | real variable | translational preload |
t_preload_y | real variable | translational preload |
t_preload_z | real variable | translational preload |
r_preload_x | real variable | rotational preload |
r_preload_y | real variable | rotational preload |
r_preload_z | real variable | rotational preload |
t_offset_x | real variable | translational offset |
t_offset_y | real variable | translational offset |
t_offset_z | real variable | translational offset |
r_offset_x | real variable | rotational offset |
r_offset_y | real variable | rotational offset |
r_offset_z | real variable | rotational offset |
i_geoMarker | marker | geometry ref marker |
j_geoMarker | marker | geometry ref marker |
geoRadius | real variable | geometry radius |
geoLength | real variable | geometry length |
Request Definition
disp_request
Component name: | Component units: | Definition: |
|---|---|---|
dx | length | x-distance between i_marker and j_marker |
dy | length | y-distance between i_marker and j_marker |
dz | length | z-distance between i_marker and j_marker |
dm | length | magnitude |
ax | angle | angle about x |
ay | angle | angle about y |
az | angle | angle about z |
amag | angle | magnitude |
velo_request
Component name: | Component units: | Definition: |
|---|---|---|
vx | velocity | x-velocity between i_marker and j_marker |
vy | velocity | y-velocity between i_marker and j_marker |
vz | velocity | z-velocity between i_marker and j_marker |
vm | velocity | magnitude |
wx | angular_velocity | |
wy | angular_velocity | |
wz | angular_velocity | |
wm | angular_velocity | magnitude |
force_request
Component name: | Component units: | Definition: |
|---|---|---|
fx | force | x-force between i_marker and j_marker |
fy | force | y-force between i_marker and j_marker |
fz | force | z-force between i_marker and j_marker |
fm | force | magnitude |
tx | torque | |
ty | torque | |
tz | torque | |
tm | torque | magnitude |
Calculation of Frequency Dependent Bushing Force
Below is an outline of the frequency-dependent bushing model.
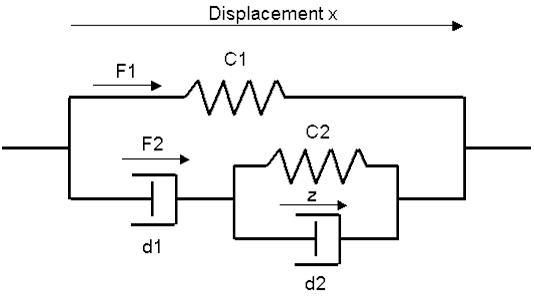
Constant stiffness in frequency-dependent term of F_lin:
The static forces are computed by the splines from the property file; this is the first term,  , of
, of  But the second term,
But the second term,  , is computed with a constant value C1, obtained at the zero position of the spline.
, is computed with a constant value C1, obtained at the zero position of the spline.
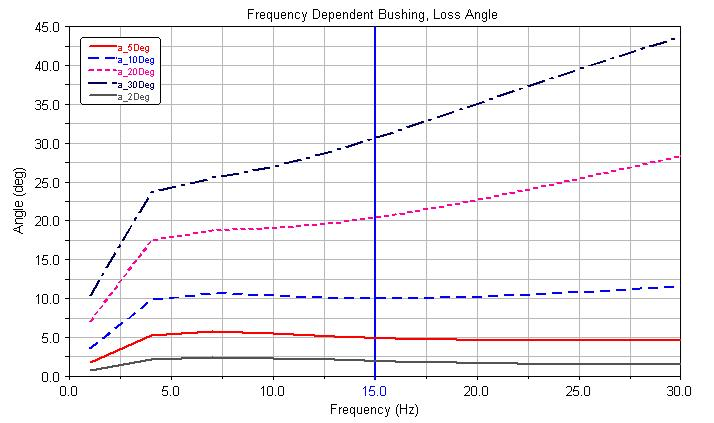
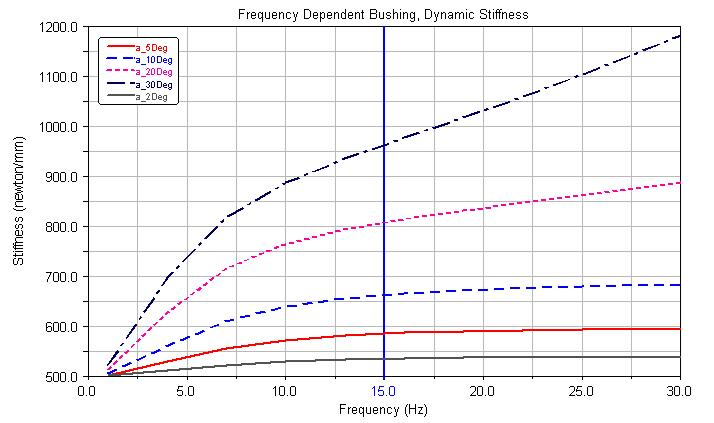
, of But the second term, , is computed with a constant value C1, obtained at the zero position of the spline.Reference frequency at 15 Hz for loss angle
The coefficients alpha, beta, gamma are linear scaled to obtain the loss angle at 15 Hz. The dynamic stiffness can not be controlled. The stiffening factor is coupled with the loss angle. For example:
Loss Angle [Deg]: | Stiffening factor: |
|---|---|
5 | 1.17 |
10 | 1.34 |
I-Part and J-Part compliance
Similar to the standard bushing in Adams Car a linear bushing file (.lbf, or .xml) can be selected to account for compliance at the I and/or J part. When doing so the spline for the c1 spring and the overall damping of the frequency bushing will be adjusted in accordance with the combined stiffness and damping of the 2 or 3 bushings.
This means that the stiffness and damping at the lower frequency range will agree to the combined stiffness of the selected bushings. Though at higher frequency the stiffness and damping may differ from the exact combined solution due to the large non-linear effects of the frequency bushing.
Example Frequency Bushing Property File
The following is a sample frequency bushing property file (extension .fbu). This sample file contains the minimum set of required data.
$---------------------------------------------------------MDI_HEADER
[MDI_HEADER]
FILE_TYPE = 'fbu'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
$------------------------------------------------------------GENERAL
[GENERAL]
BUSHING_SHAPE = 2
$--------------------------------------------------------------UNITS
[UNITS]
LENGTH = 'mm'
ANGLE = 'degrees'
FORCE = 'newton'
MASS = 'kg'
TIME = 'second'
$------------------------------------------------DISPLACEMENT_SCALES
[DISPLACEMENT_SCALES]
X_SCALE = 1.0
Y_SCALE = 1.0
Z_SCALE = 1.0
RX_SCALE = 1.0
RY_SCALE = 1.0
RZ_SCALE = 1.0
$-------------------------------------------------------FORCE_SCALES
[FORCE_SCALES]
FX_SCALE = 1.0
FY_SCALE = 1.0
FZ_SCALE = 1.0
TX_SCALE = 1.0
TY_SCALE = 1.0
TZ_SCALE = 1.0
$------------------------------------------------------------DAMPING
[DAMPING]
X_LOSS_ANGLE = 5
Y_LOSS_ANGLE = 5
Z_LOSS_ANGLE = 5
TX_LOSS_ANGLE = 5
TY_LOSS_ANGLE = 5
TZ_LOSS_ANGLE = 5
$-----------------------------------------------------------FX_CURVE
[FX_CURVE]
{ x fx}
-10.0 -2700.0
-8.0 -2160.0
-6.0 -1620.0
-4.0 -1080.0
-2.0 -540.0
0.0 0.0
2.0 540.0
4.0 1080.0
6.0 1620.0
8.0 2160.0
10.0 2700.0
$-----------------------------------------------------------FY_CURVE
[FY_CURVE]
{ y fy}
-10.0 -2700.0
-8.0 -2160.0
-6.0 -1620.0
-4.0 -1080.0
-2.0 -540.0
0.0 0.0
2.0 540.0
4.0 1080.0
6.0 1620.0
8.0 2160.0
10.0 2700.0
$-----------------------------------------------------------FZ_CURVE
[FZ_CURVE]
{ z fz}
-10.0 -2700.0
-8.0 -2160.0
-6.0 -1620.0
-4.0 -1080.0
-2.0 -540.0
0.0 0.0
2.0 540.0
4.0 1080.0
6.0 1620.0
8.0 2160.0
10.0 2700.0
$-----------------------------------------------------------TX_CURVE
[TX_CURVE]
{ ax tx}
-45.0 -2025000.0
-36.0 -1620000.0
-27.0 -1215000.0
-18.0 -810000.0
-9.0 -405000.0
0.0 0.0
9.0 405000.0
18.0 810000.0
27.0 1215000.0
36.0 1620000.0
45.0 2025000.0
$-----------------------------------------------------------TY_CURVE
[TY_CURVE]
{ ay ty}
-45.0 -2025000.0
-36.0 -1620000.0
-27.0 -1215000.0
-18.0 -810000.0
-9.0 -405000.0
0.0 0.0
9.0 405000.0
18.0 810000.0
27.0 1215000.0
36.0 1620000.0
45.0 2025000.0
$-----------------------------------------------------------TZ_CURVE
[TZ_CURVE]
{ az tz}
-45.0 -36000.0
-36.0 -28800.0
-27.0 -21600.0
-18.0 -14400.0
-9.0 -7200.0
0.0 0.0
9.0 7200.0
18.0 14400.0
27.0 21600.0
36.0 28800.0
45.0 36000.0