Theory of Flexible Bodies
Rotor Dynamics
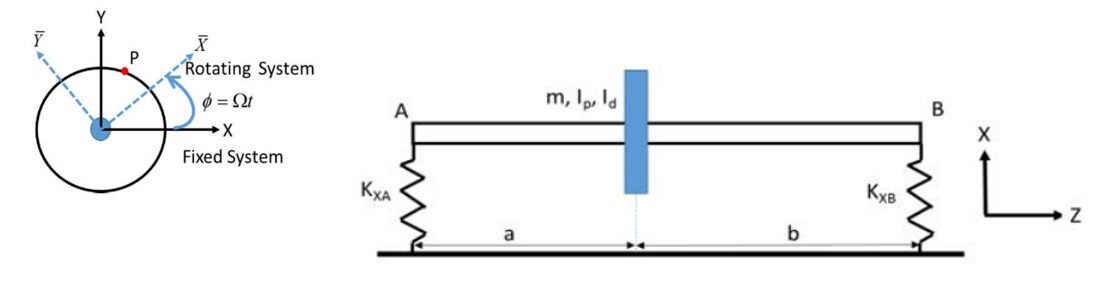
The equations of motion in a fixed reference frame of a rotor operating at speed, Ω is[1]
 | (79) |
where,
[M ] = Modal Mass matrix
{g} = Degrees of freedom in the fixed reference system
[BS ] = Modal damping in fixed frame
[BR ] = Modal damping in rotating frame
[G ] = Gyroscopic matrix
[K ] = Modal stiffness matrix
[KC ]R = Circulatory matrix due to damping in rotating frame
[KG ] = Differential Stiffness due to axial (radial) centrifugal load
[FS ] = External force vector in fixed reference frame
Rearranging Equation (79) above and combining terms we have:
 | (80) |
where,
 | (81) |
Here, {QS} contains the local rotor dynamics terms as a function of Ω in the fixed reference frame. It is applied in Adams as a distributed force acting on the flexible rotor with a dependency on Ω. To accomplish this, the MNF needs to include [G ], [KC ]R and [KG ], in addition to [M ], [K ] and [B ].
References
[1] MSC.Nastran Rotordynamics Guide