Transient Behavior in Pacejka '89 and '94
The previous Magic Formula equations are valid for steady-state tire behavior. When driving, however, the tire requires some response time on changes of the inputs. In tire modeling terminology, the low-frequency behavior (up to 8 Hz) is called transient behavior.
For estimating this transient tire behavior, a linear transient model is used as described in [1].
In this linear transient model the tire contact point S' is suspended to the wheel-rim plane with a longitudinal and lateral spring, with respectively stiffness's CFx and CFy, see Reference. In the figure below a top view of the tire with the single contact point S' and the longitudinal (u) and lateral (v) carcass deflections is shown.
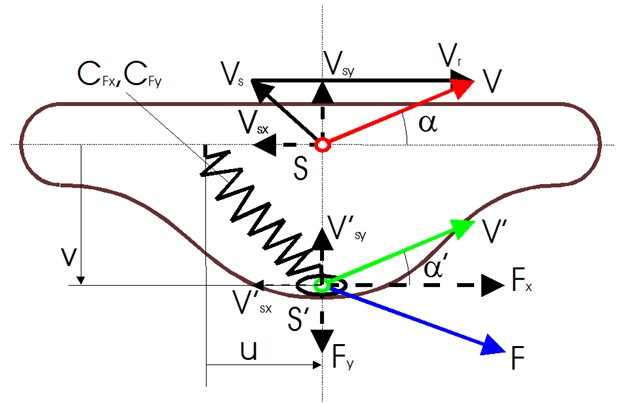
The contact point may move with respect to the wheel-rim plane and road. Movements relative to the road will result in tire-road interaction forces. Differences in slip velocities at point S and point S' will result in the tire carcass to deflect. The change of the longitudinal deflection u can be defined as:
and the lateral deflection v as:
For small values of slip the side force Fy can be calculated using the cornering stiffness CFα as follows:
While the lateral force on the carcass reads:

When introducing the lateral relaxation length σα as:

the differential equation for the lateral deflection can be written as follows:
For linear small slip we can define the practical slip quantity α' as:
With α' the equation for the lateral deflection becomes:
Similar the differential equation for longitudinal direction with the longitudinal relaxation length σκ can be derived:
with the practical slip quantity 

Using these practical slip quantities,  and
and  , the Magic Formula equations as described in previous section can be used to calculate the transient tire-road interaction forces and moments.
, the Magic Formula equations as described in previous section can be used to calculate the transient tire-road interaction forces and moments.
and , the Magic Formula equations as described in previous section can be used to calculate the transient tire-road interaction forces and moments.The longitudinal and lateral relaxation lengths (σκ and σα) are estimated with the longitudinal and lateral stiffness of the non-rolling tire, respectively CFx and CFy:

In case the longitudinal stiffness is not available, the longitudinal stiffness is estimated with:

Reference
1. H.B. Pacejka, Tyre and Vehicle Dynamics, 2002, Butterworth-Heinemann, ISBN 0 7506 5141 .