Precision Move
Edit → Move
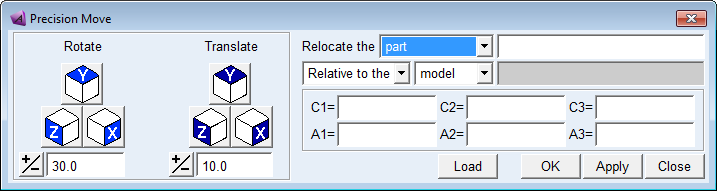
Moves objects either by increments or to precise coordinates.
You can select to move the objects relative to a specified object’s coordinate system, called the reference coordinate system. You can also select to move objects relative to the screen. In addition, you can use the Precision Move dialog box to view the coordinates of one object in relation to another.
Option | Description |
|---|---|
Rotate Y, X, Z | Select each to rotate an object with respect to a body-fixed or reference coordinate system in incremental amounts specified in the +/- text box. You specify the reference coordinate system using the Relative to/About the options. |
Translate Y, X, Z | Select each box to translate an object with respect to a body-fixed or reference coordinate system in incremental amounts specified in the +/- text box. You specify the reference coordinate system using the Relative to/About the options. |
Relocate the | Enter the object or objects to be moved. |
Relative to/About the | Select to define the coordinate system whose axes are to be used for defining rotations and translations. For rotations: ■Relative to rotates objects in place (their locations do not change) and their rotations are with respect to the coordinate system specified in the Relative to the text box. ■About the rotates the objects rotate about the origin of the coordinate system specified (their locations change) and the rotations are with respect to the coordinate system specified in the About the text box. Translations are with respect to the coordinate system defined as either Relative to the or the About the. |
Model/Part/Marker/View/Entity/Screen | By default, the Precision Move dialog box moves the selected objects relative to the default coordinate system. You can specify that Adams View use a different coordinate system as the reference coordinate system. The rotational and translational coordinates you enter for the move or the incremental values you select are with respect to the origin and orientation of this coordinate system. You can select the following types of objects: ■Model - Global coordinate system. ■View - Adams View defined View, such as front, right, or left. Use the Database Navigator to select the name of the view. ■Entity - Any entity, including those that are not on the screen. Entities also include the working grid and gravity. ■Screen - The plane of the screen. When you select to move objects relative to the screen, the Precision Move dialog box changes the dials on the left to those shown in this picture. The dials translate and rotate the objects: ■Think of the translation as pulling the object in the direction of the arrow. For example, when you select the small arrow that points up, you pull an object up along the vertical axis. The double arrows to the right translate an object along an axis that is normal to the screen (works only if the view is in perspective mode). ■Think of the rotation as pushing on an object at that point. For example, if you select the arrow that points to the right, you are pushing the horizontal axis back, resulting in a positive rotation around the vertical axis. |
C1 - C3 | Enter the coordinates to which you want to move an object relative to another object’s coordinate system (the reference coordinate system). You specify the reference coordinate system using the Relative to the and About the options. Note: If you select Load, C1 displays the current coordinates of an object. |
A1 - A3 | Enter the coordinates to which you want to rotate an object relative to another object’s coordinate system (the reference coordinate system). You specify the reference coordinate system using the Relative to the and About the options. Enter the coordinates in the default coordinate system (Cartesian, cylindrical, or spherical). Note: If you select Load, C1 displays the current coordinates of an object. |
Load | Select to view the current coordinates of an object with respect to the coordinate system of another object (reference coordinate system). Adams View displays the coordinates in the six position text boxes (C1 through C3 for translation and A1 through A3 for rotation). For example, if you want to ensure that two markers, which you want to connect using an inplane joint, are in the same plane, you can set one marker as the object to be moved and the other object as the relative to object. You can then view the rotation coordinates of the first marker to ensure that they are (0, 0, 0). |