Synchronizers
This component represents a clutch that brings a gear and shaft to the same rotational speed. A synchronizer can be attached to a Gear Pair or to arbitrary parts. A synchronizer allows gear shifting during simulation (useful for full-vehicle simulations). The synchronizer is modeled as a dog clutch and optional friction clutch.
Learn about synchronizers:
Creating or Modifying Synchronizers
To create or modify synchronizers:
■From the Driveline Components menu, point to Synchronizer, and then select New/Modify.
■Press F1 and then follow the instructions in the dialog box help for Synchronizer.
■Select OK.
About Synchronizers
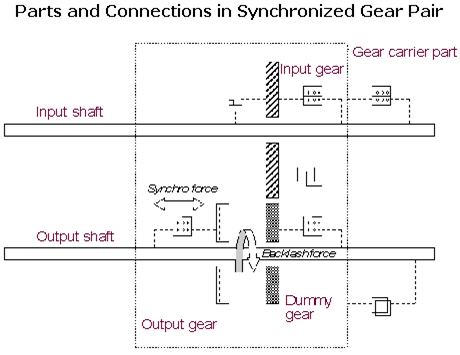
You can use synchronizers to model the clutches between gears in constant mesh. In a synchronized constant mesh gearbox all gears are positively meshed to each other. They are mounted on bearings and, when selected, are coupled to proper shafts by means of a synchronizer device. The synchronizer consists of a single component torque acting between the I and J parts. The torque is a sum of friction ring torque and dog clutch torque. During a gear shift, the friction ring will normally engage first to bring the gear and shaft velocities together. At the point when the velocity difference is less than Dog Clutch Vlimit the dog clutch will begin to engage and the drive torque will be then be transmitted through the compliance represented by the Dog Clutch Stiffness and Dog Clutch Damping.
Note: | Adams Driveline automatically creates a kinematic motion in this component to constrain the I and J parts during static equilibrium. |
You can modify the behavior of the synchronizer by setting the following parameters:
Friction Ring active
Frictional torque start time
Frictional torque step time
Frictional torque max
Frictional torque max vlimit
Dog clutch vlimit
Dog clutch step time
Dog clutch stiffness
Dog clutch damping
Request Definition
Result name: <synchronizer name>_data
Component name: | Component units: | Definition: |
|---|---|---|
synchronizer_torque | torque | The total torque (friction ring plus dog clutch) between the two parts (for example, gear and shaft). |
frictional_torque | torque | The component of total torque contributed by the friction ring. |
dog_clutch_torque | torque | The component of total torque contributed by the dog clutch. |
synchronizer_active_flag | none | A Boolean value (0 or 1) indicating when the synchronizer is active. |
frictional_active_signal | none | An integer value (0-1) indicating when the friction ring has been engaged. |
dog_clutch_active_signal | none | An integer value (0-1) indicating when the dog clutch has been engaged. |
dog_clutch_active_flag | none | A Boolean value (0 or 1) indicating when the dog clutch is active. |
dog_clutch_engagement_time | time | The time at which the dog clutch engagement began. |
dog_clutch_engagement_angle | angle | The angle between dog clutch halves. |
az | angle | The angle between the two parts. |
wz | angular_velocity | The angular velocity between the two parts. |
transmission_demand | none | The transmission gear demand. |