Formulations in Adams Solver
There are three formulation options for solving Adams Flex flexible bodies. The default "Original" formulation and two other choices: the "optimized" and "max optimization" formulations. All these formulations are based the 'floating frame of reference' method. They only differ in the ways the equations of motion are solved numerically.
These formulations can be selected through the Adams Solver PREFERENCES statement as
PREFERENCES/FLEX_BODY_FORMULATION = {ORIGINAL, OPTIMIZED, MAX_OPTIMIZATION}
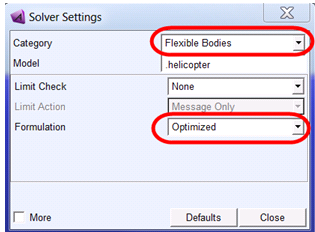
Also, in Adams View, the formulation can be selected from Settings → Solver → Flexible Bodies - Formulation:
OPTIMIZED FORMULATION
In this formulation, the 'modal equations' of each flex body are solved separately from the rest of equations. A separate numerical integrator is used for each subsystem of modal equations. The performance gain is obtained using better linear algebra techniques which leverage special structure of the Jacobian matrix used in the modal equations.
Current limitations:
■Generalized damping of flex body is not supported; users are advised to use modal damping
■Full or custom inertia coupling is not supported. Users are advised to use either constant or partial inertia coupling
■Flex contacts (flex-to-flex or flex-to-rigid) are not supported
■SI2 integrators are not supported. Only HHT and GSTIFF- I3 integrators are supported
■Motion on flex marker is not supported (workaround - use dummy part)
■Flex-to-flex Joints/Jprims are not supported (workaround - use dummy part)
■Some models need kmax=1 settings in GSTIFF for speed and robustness improvement
In this formulation some of the entries in Jacobian matrix are neglected which are multiplied by h or h2 where h is the time step of numerical integrator. As h approaches → 0, these entries become negligible. Due to this assumption this formulation shows better performance when the step size is restricted through HMAX settings. Without this restriction, for some models the Newton-Raphson scheme takes more iterations to converge making this formulation slower than the Original formulation.
MAX OPTIMIZATION FORMULATION
In this formulation, the 'modal equations' of each flex body are solved separately from the rest of equations using a semi-analytical method. This is quite similar to the Optimized formulation; but, for some models it can outperform the Optimized formulation.
Current limitations:
■All the limitations of Optimized formulation
■Does not support constraints applied directly to the flexible body; one could consider replacing the flex body joints/jprims with stiff bushings
FLEXIBLE BODY FORMULATION SELECTION
The Optimized and Max Optimization formulations will show performance gain (without losing accuracy) for models where there is no 'strong coupling' between the modal deformation and rigid body motion in the flex body. They are targeted for models where 'weak coupling' is present. Note that the Original formulation is the most robust formulation as it can handle any type of coupling.
Due to the current limitations of the Optimized and Max Optimization formulations described above, some type of models are not supported. However, if the one's global setting for formulation (it is not possible to specify this setting per flexible body) is not compatible with some flexible bodies in the model, solver will automatically revert to the compatible formulation.
For example:
■If the Max Optimization formulation is selected but a flexible body in the model is connected directly to a kinematic joint, Adams Solver will automatically revert to usage of the Optimized formulation for all flexible bodies in the model
■If the Optimized formulation is selected but a flexible body in the model uses full inertia coupling, Adams Solver will automatically revert to usage of the Original formulation for all flexible bodies in the model