FFRF coordinate system
The flexible body formulation used in Adams is based on the floating frame of reference formulation (FFRF) and some of the basic concept regarding FFRF will be briefly recalled in this section. A detailed elaboration can be found in [1].
In general, the flexible body is divided into more than one element. The following notation is used in this section. For an element j on a flexible body i, we can write the position coordinates of an arbitrary point on the flexible body with respect to the origin of the flexible body coordinate system as
 | (1) |
where,
 = the transformation matrix of the element coordinate system with respect to the body coordinate system.
= the transformation matrix of the element coordinate system with respect to the body coordinate system. = the orthogonal constant transformation matrix
= the orthogonal constant transformation matrix = the element shape function.
= the element shape function. = the vector of nodal coordinates of element j defined in body i in body coordinate system.
= the vector of nodal coordinates of element j defined in body i in body coordinate system.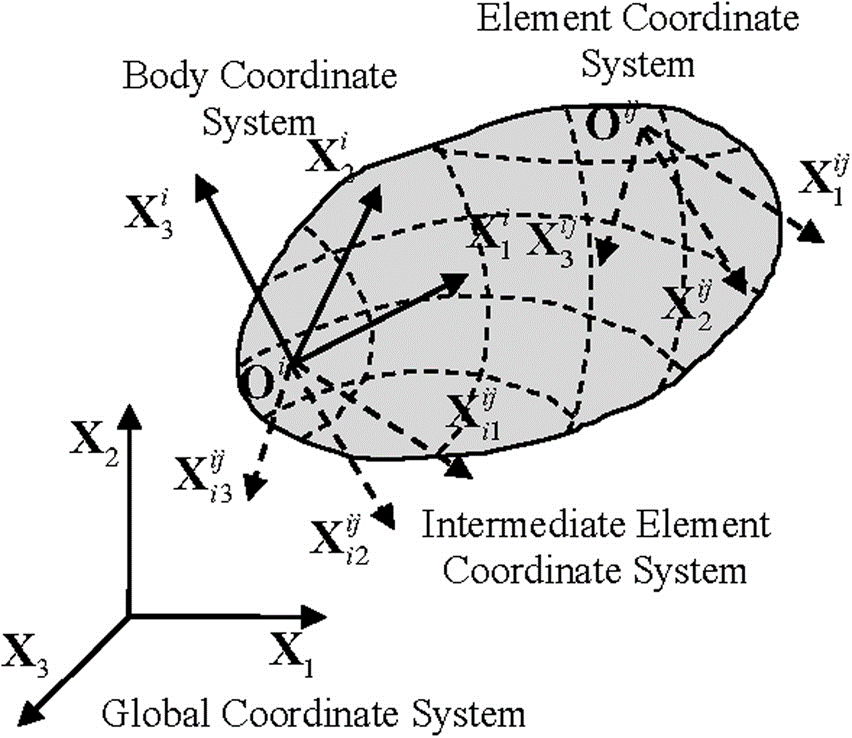
Figure 1 Finite-element flexible body coordinate system
In this case, the global position vector of an arbitrary point p on the finite element j of body i can be written as,
 | (2) |
The coordinate system  of body i represents a unique standard for all elements of this body and as such serves to express the connectivity between these elements. If
of body i represents a unique standard for all elements of this body and as such serves to express the connectivity between these elements. If  is used to denote the total vector of nodal coordinates of body i resulting from the finite-element discretization, then the vector of element nodal coordinate can be written by using a Boolean matrix that represents the element connectivity conditions as,
is used to denote the total vector of nodal coordinates of body i resulting from the finite-element discretization, then the vector of element nodal coordinate can be written by using a Boolean matrix that represents the element connectivity conditions as,
of body i represents a unique standard for all elements of this body and as such serves to express the connectivity between these elements. If is used to denote the total vector of nodal coordinates of body i resulting from the finite-element discretization, then the vector of element nodal coordinate can be written by using a Boolean matrix that represents the element connectivity conditions as, | (3) |
Such that Equation (2) becomes,
 | (4) |
where,  is the space dependent matrix.
is the space dependent matrix.
is the space dependent matrix.