FE_LOAD
The FE_LOAD statement defines a distributed applied load (force and moment) per unit length or per unit area or per unit volume. The nature of the force depends on the FE_PART this load acts upon. For example, if the FE_PART is a beam or cable, then the load is understood to have units of force and moment per unit length.
The FE_LOAD is an action-only force and moment. There is no reactive component acting on some other element.
For beams and cables, the function expressions can depend on measures S, SD, SV and SA. Function S takes values between 0 and 1 and the other measures provide the values of the global position, velocity and acceleration at the position defined by S (see documentation of functions S, SD, SV and SA).
Format
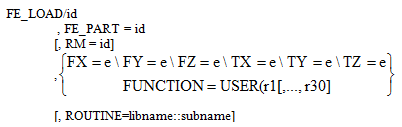
Arguments
FE_PART=id | Specifies the FE_PART where this load is acting upon. |
RM=id | Specifies the MARKER which determines the orientation of the distributed load components. If this option is not present, the load components are relative to the ground origin coordinates. |
FUNCTION=USER(r1[,…,r30] | Specifies up to thirty user-defined constants used to compute the value of the distributed load components. |
FX=e | Specifies the magnitude and sign of the x component of the distributed force applied by this element. The direction of this force component is parallel to the x-axis of the RM marker. |
FY=e | Specifies the magnitude and sign of the y component of the distributed force applied by this element. The direction of this force component is parallel to the y-axis of the RM marker. |
FZ=e | Specifies the magnitude and sign of the z component of the distributed force applied by this element. The direction of this force component is parallel to the z-axis of the RM marker. |
TX=e | Specifies the magnitude and sign of the x component of the distributed force applied by this element. The direction of this force component is parallel to the x-axis of the RM marker in the sense of the right-hand rule (that is, a positive torque causes a counterclockwise rotation). |
TY=e | Specifies the magnitude and sign of the y component of the distributed force applied by this element. The direction of this force component is parallel to the y-axis of the RM marker in the sense of the right-hand rule (that is, a positive torque causes a counterclockwise rotation). |
TZ=e | Specifies the magnitude and sign of the z component of the distributed force applied by this element. The direction of this force component is parallel to the z-axis of the RM marker in the sense of the right-hand rule (that is, a positive torque causes a counterclockwise rotation). |
ROUTINE=libname::subname | Specifies an alternative library and name for the user subroutine. The default name for this user-written subroutine is FEloadsub. The name is case sensitive and it must be written in C++. See the documentation for the FEloadsub. |
Example
The FE_LOAD can be defined as follows for a general distributed load shown in the Figure 11.
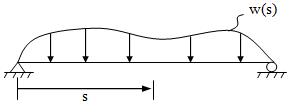
Figure 11 A distribute load
FE_LOAD/1
, FE_PART=3
, FX= 0\
, FY= -30*SIN(PI*S)\
, FZ= 0\
, TX= 0\
, TY= 0\
, TZ= 0
Parameter S has values between 0.0 and 1.0. When evaluating the loads during a simulation, Adams Solver C++ sets the value of S at every integration point and computes the value of the given expression for the distributed load and its derivatives.
Caution: | ■If the FE_LOAD is applied to 2D beam, the force components (FX, FY and FZ) must be defined in the global coordinate system. Adams solver neglects the RM argument in this case. ■If the FE_LOAD is applied to 2D beam, the applied moment per unit length is not supported. Adams solver neglects the arguments: TX, TY, TZ in this case. ■For 2D beams, the measures SD, SV and SA have 3 components only. The first component represents the translation along first axis of global plane, the second component represents the translation along second axis of global plane and the third component represents the in-plane rotation; for example, in the case of 2DBEAMZX, SV(1) = translational velocity along global Z axis, SV(2) = translational velocity along global X axis, SV(3) = angular velocity about global Y axis. |