ORIENT
The ORIENT function returns a scalar rotational value related to two Markers. The rotational value is defined by specifying an orientation system and a specific component. The ORIENT function may be used to compute Euler angles corresponding to rotation sequences other than the standard body-fixed 3-1-3 Euler rotation sequence used by Adams Solver (C++). The exact meaning of the computed value depends on the parameters supplied by the user.
Format
ORIENT( orientation_system, component, i [,j] )
Arguments
orientation_system | A value specifying the orientation system or convention. (See table below.) |
component | A value specifying the value to be computed. (See table below.) |
i | The first Marker. |
j | The second marker. When j is not specified, Adams Solver (C++) defaults to the global coordinate system. |
Orientation system | Component | Computed value | Comment |
|---|---|---|---|
1 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 1-2-3 Euler rotation sequence respectively. | |
2 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 2-3-1 Euler rotation sequence respectively. | |
3 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 3-1-2 Euler rotation sequence respectively. | |
4 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 1-3-2 Euler rotation sequence respectively. | |
5 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 2-1-3 Euler rotation sequence respectively. | |
6 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 3-2-1 Euler rotation sequence respectively. | |
7 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 1-2-1 Euler rotation sequence respectively. | |
8 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 1-3-1 Euler rotation sequence respectively. | |
9 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 2-1-2 Euler rotation sequence respectively. | |
10 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 2-3-2 Euler rotation sequence respectively. | |
11 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 3-1-3 Euler rotation sequence respectively. | Standard Euler sequence used by Adams Solver (C++). First angle is PSI, second angle is THETA and third angle is PHI. |
12 | 1, 2 or 3 | First, second or third Euler angle of a body-fixed 3-2-3 Euler rotation sequence respectively. | |
13-24 | Not supported by Adams Solver (C++) | ||
25 | 1, 2 or 3 | AX(i, j), AY(i, j) or AZ(i, j) respectively. | |
26 | 1, 2 or 3 | YAW(i, j), PITCH(i, j) or ROLL(i, j) respectively. | |
27 | 1, 2, 3, or 4 | First, second, third or fourth Euler parameter respectively. | |
28 | Not supported by Adams Solver (C++) | ||
29 | 1, 2, 3, 4, 5, 6, 7, 8 or 9 | Entry of the direction cosine matrix. The values are returned in row order, for example, component 1 stands for entry a11, component 2 stands for entry a12, component 3 stands for entry a13, component 4 stands for entry a2,1, and so forth. |
Extended Definition
The detailed definition for the direction cosine matrix is described below
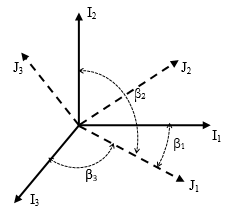
Figure 7 Direction cosines
Two coordinate system defined by marker I (solid line) and marker J (dash line) are shown in Figure 7. Let  be the unit vectors along the
be the unit vectors along the  axes, respectively, and
axes, respectively, and  be the unit vectors along the
be the unit vectors along the  axes, respectively. Let
axes, respectively. Let  be the angle between
be the angle between  and
and  ,
,  be the angle between
be the angle between  and
and  , and
, and  be the angle between
be the angle between  and
and  . Then the components of the unit vector
. Then the components of the unit vector  along the
along the  axes are given by
axes are given by
be the unit vectors along the axes, respectively, and be the unit vectors along the axes, respectively. Let be the angle between and , be the angle between and , and be the angle between and . Then the components of the unit vector along the axes are given by
where  are the direction cosines of the
are the direction cosines of the  axes with respect to
axes with respect to  . In a similar manner, the direction cosines of the
. In a similar manner, the direction cosines of the  axes with respect to
axes with respect to  can be denoted as
can be denoted as  , and the direction cosines of the
, and the direction cosines of the  axes can be denoted as
axes can be denoted as  .
.
are the direction cosines of the axes with respect to . In a similar manner, the direction cosines of the axes with respect to can be denoted as , and the direction cosines of the axes can be denoted as .A three-dimensional vector x whose components in the coordinate system  and
and  are denoted as
are denoted as  and
and  , then one has
, then one has  where
where  and
and  , and A is the transformation matrix given by direction cosines matrix as
, and A is the transformation matrix given by direction cosines matrix as
and are denoted as and , then one has where and , and A is the transformation matrix given by direction cosines matrix as 
Caution: |
Examples
GFORCE/1, I=21, JFLOAT=31, RM=41
, FX=-20*ORIENT(3, 2, 43, 32)
This GFORCE statement applies a force at the origin of Marker 21 along the x-axis of Marker 41. The reaction force is on floating Marker 31. The floating Marker 31 can belong to another part but its location is always the same as Marker 21.
The value of the force is -20 times an angle between Markers 43 and 32. The angle is the second angle in a body-fixed Euler 3-1-2 rotation sequence.
See other Displacement measures available.