New Gear AT Force
To create Gear AT Force there are number of parameters to be entered in following tabs of the dialog box shown in Figure 346 :
Main
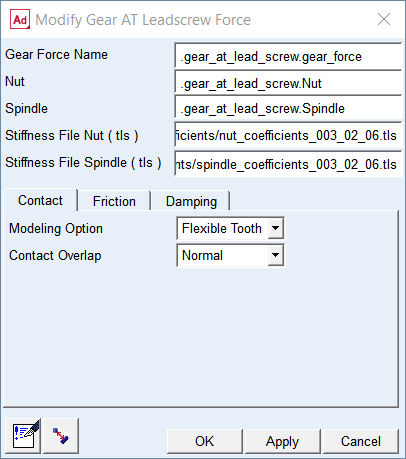
Figure 346 Create or modify gear force
For the options | Do the following |
|---|---|
Gear Force Name | Enter the Gear Force name to create or browse for existing gear force to modify |
Nut | Select existing Nut element |
Spindle | Select existing Spindle element |
TLS File Nut | Browse for *.TLS file of Nut prepared during meshing preprocessing step. |
TLS File Spindle | Browse for *.TLS file of Spindle prepared during meshing preprocessing step. |
Comments | Select to display a dialog box where you can add multi-line comments to any entity to describe its purpose and function. |
Clearance check | Select to compute the clearance in the gear pair by using the solids of the gear rim. |
Extended definition:
Spindle / Nut elements
The Gear AT Force element is defined by Spindle and Nut. Gear AT Elements can be selected or created by the GUI options Pick, Browse, Guess or Create; see section Gear AT Element to learn more about the creation of a Gear AT Element.
Gear AT Mesh gives you the full control about the number of contact planes and the Mesh_density; see section Gear AT Mesh. Therefore you need to select the desired *.TLS files for the spindle and nut
Clearance check
The icon  of Figure 346 computes the clearance in the gear pair by using the solids of the gear rim. If clearance - what should be the normal case - is found, it will be shown as depicted by Figure 352. All gear pairs in the model will be checked for the minimum clearance value. Note that solids do not include the micro-geometry.
of Figure 346 computes the clearance in the gear pair by using the solids of the gear rim. If clearance - what should be the normal case - is found, it will be shown as depicted by Figure 352. All gear pairs in the model will be checked for the minimum clearance value. Note that solids do not include the micro-geometry.
of Figure 346 computes the clearance in the gear pair by using the solids of the gear rim. If clearance - what should be the normal case - is found, it will be shown as depicted by Figure 352. All gear pairs in the model will be checked for the minimum clearance value. Note that solids do not include the micro-geometry.Contact
Contact algorithm implemented in Gear AT is based on numerical approach which makes possible to account for varying backlash and contact stiffness at arbitrary shaft positions and angular misalignments. It can calculate contact up to eleven teeth at a time to capture variation of gear mesh stiffness.
To define gear pair contact force there are 2 modeling options available, Rigid Gear and Flexible Tooth, use an advanced surface-to-surface contact algorithm, which delivers accurate and smooth results. The tooth flanks are described by the extruded profile.
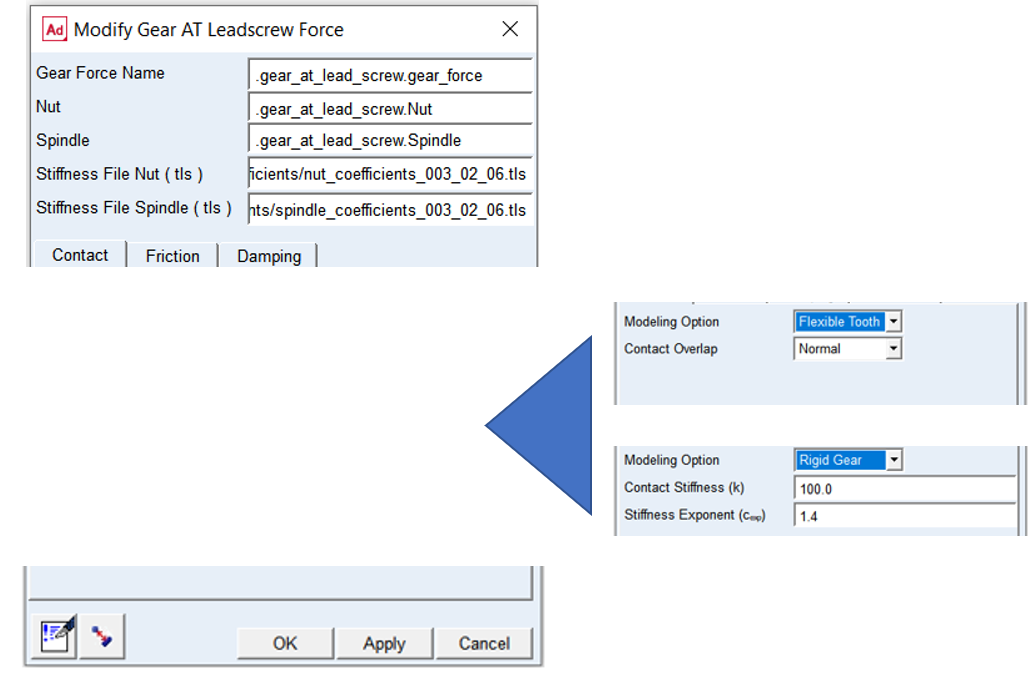
Figure 347 Contact tab of Gear Force
For the options | Do the following |
|---|---|
Modeling Option | Choose one of the following option to define the type of contact: ■Rigid Gear ■Flexible Tooth |
If selected Rigid Gear modeling option: | |
Contact Stiffness (k) | Enter the value of contact stiffness that is used to calculate the contribution of the material stiffness to the normal contact force; see Equation (28) Default: 1.0e6 |
Stiffness Exponent (cexp) | Enter the value of stiffness exponent that specifies the exponent of the force deformation characteristic. For stiffening characteristic use value of cexp>1.0; see Equation (28) Default: 1.4 |
If selected Flexible Tooth modeling option: | |
Contact Overlap | Choose one of the following option to control relaxation of contact algorithm: ■Small (stiffer contact) ■Normal ■High (softer contact) Default: Normal |
Extended definition:
Modeling option defines the type of contact: you have 2options to select from. The first modeling option Rigid Gear. It is modeled with Adams GFORCE element as well as Flexible Tooth contact options.
Other modeling option Flexible Tooth use an advanced surface-to-surface contact algorithm, which delivers accurate and smooth results. The algorithm considers varying shaft positions and angular misalignments. The thread flanks are described by the extruded profile. The solids for display are not used for the contact computation.The contact is checked for the left and right flanks of 5 thread pairs.
For rigid body contact, the maximum penetration of each contact plane of Leadscrew nut into the flank of Spindle is used for the of the corresponding contact force Fcnt as shown by Equation (28). The vector sum of all contact forces is giving the resulting contact force and torque vector per gear pair.
 | (28) |
where:
k contact stiffness
pene maximum penetration
cexp exponent force law
pene maximum penetration
cexp exponent force law
In general, the deformation of a tooth is coming from the deformation of the wheel body, the deformation of the teeth and the 'Hertz contact'. The contribution of the 'Hertz contact' is limited compared to the two other contributions. Consequently, one has to assume, that the Stiffness Exponent is close to 1 or only slightly higher. An exponent of 1 corresponds to a linear contact stiffness.
For the Flexible Tooth contact model, the transmitted force between tooth flanks considers the flexibility of the teeth through the solution of a non-linear contact problem. The contact algorithm is of type surface-to-surface. A small relaxation by Contact Overlap is introduced for better performance; supported values are Small, Normal or High. Small overlap corresponds to stiffer contact whereas High overlap corresponds to softer contact. The effect of this additional flexibility is small compared to the flexibility of the threads.
Friction
Friction of gear pair implemented in Gear AT is based on Coulomb friction model. Contribution of friction to total contact force can be turned On / Off by the Friction Model option. It is computed for each contact plane of Leadscrew nut based on the relative sliding velocity at the contact point.
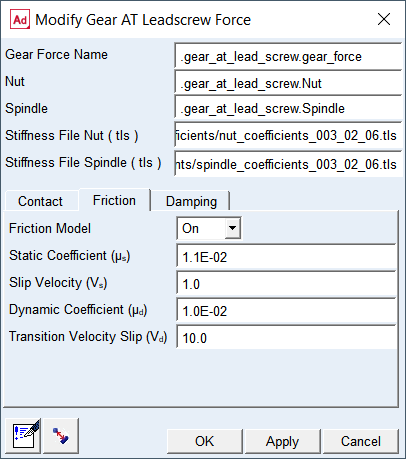
Figure 348 Friction tab of Gear Force
For the options | Do the following |
|---|---|
Friction Model | Choose one of the following options: ■Off - in this case the other fields in this card will be disabled ■On Default: Off |
Static Coefficient (µs) | Enter value of Static Friction Coefficient to define Coulomb friction Default: 1.1e-2 [-] |
Slip Velocity (vs) | Enter value of Slip Velocity to define Coulomb friction Default: 1.0 [mm/sec] |
Dynamic Coefficient (µd) | Enter value of Dynamic Coefficient to define Coulomb friction Default: 1.0e-2 [-] |
Transition Velocity Slip (vd) | Enter value of Transition Velocity Slip to define Coulomb friction Default: 10.0 [mm/sec] |
Extended definition:
The static friction coefficient is usually somewhat higher than the dynamic friction coefficient. Step functions are used for smoothing the transitions; see Figure 349. Parameter of slip velocity limits the region of sign change of the sliding velocity. The combination of very small slip velocity and high friction can reduce the performance of the integrator. You are advised to validate his selection through post-processing of the sliding velocity. Transition velocity defines the start of the region, where the dynamic friction is constant. A small difference between slip velocity and transition velocity could also lead to numerical issues of the integrator.
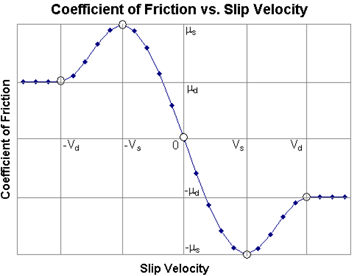
Figure 349 Friction coefficient
Damping
The effects of hydrodynamic damping depend on gap height and squeeze velocities. The implemented damping force defined through Damping Rate Oil approximates hydrodynamic damping in function of the gap for each contact plane between the tooth flanks and the corresponding squeeze velocity.
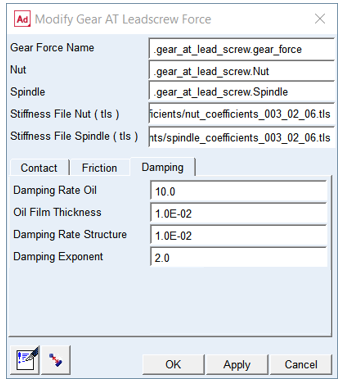
Figure 350 Damping tab of Gear AT Force
For the options | Do the following |
|---|---|
Damping Rate Oil | Enter value of Damping Rate Oil to define hydrodynamic damping as a function of oil squeeze velocity and actual oil film gap; see Figure 351. Default: 10.0 [kg/sec] |
Oil Film Thickness | Enter value of Oil Film Thickness per contact flank to define threshold value from which the hydrodynamic damping starts to build up; see Figure 351. Default: 1.0e-2 [mm] |
Damping Rate Structure | Enter value of Damping Rate Structure to define structural damping. It represents material damping therefore it is made proportional to the contact force. Default: 1.0e-2 [-] |
Damping Exponent | Enter value of Damping Exponent to define nonlinear hydrodynamic damping dependency on the actual oil film gap; see Figure 351. Default: 2.0 [-] |
Extended definition:
 | (1) |
There is no hydrodynamic damping, when b < 0; see Equation (2)
 | (2) |
Hydrodynamic damping increases exponentially with decreasing oil film height. The introduction of the damping exponent dexp in Equation (3) is used for this purpose; see Figure 351.
 | (3) |
In case of contact (penetration), the hydrodynamic damping force is set as shown by Equation (4).
 | (4) |
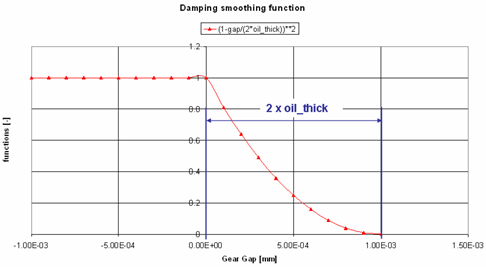
Figure 351 Function of hydrodynamic damping
Structural damping is usually a small value. The structural damping force is made proportional to the contact force as shown by Equation (33). A value of 0.01 means, that the structural damping force is 1.0 percent of the elastic contact force.
 | (33) |