Using the PAC MC Tire Model
Learn about using the University of Arizona (UA) tire model:
When to Use PAC Motorcycle
Magic-Formula (MF) tire models are considered the state-of-the-art for modeling of the tire-road interaction forces in Vehicle Dynamics applications. First versions of the mode that were published by Pacejka considered tire models for car and truck tires. In his book, Tyre and Vehicle Dynamics [1], he also described a model for motorcycle tires that is backwards compatible with the MF-MCTyre, previously resold by MSC Software, and contains the latest developments in this field.
In general, a MF tire model describes the tire behavior for rather smooth roads (road obstacle wavelengths longer than the tire radius) up to frequencies of 8 Hz. This makes the tire model applicable for all generic vehicle handling and stability simulations, including:
■Steady-state cornering
■Lane-change maneuvers
■Braking or power-off in a turn
■Split-mu braking tests
■J-turn or other turning maneuvers
■ABS braking, when stopping distance is important (not for tuning ABS control strategies)
■Shimmy and weave phenomena, which can be analyzed when the tire model is used in transient mode (see USE_MODES of PAC MC: from Simple to Complex)
■All other common vehicle dynamics maneuvers on rather smooth road (wavelength of road obstacles must be longer than the tire radius)
The PAC MC model has proven to be applicable to motorcycle tires with inclination angles to the road up to 60 degrees. In some cases, it can be used for car tires when exposed to large camber.
PAC MC and Previous Magic Formula Models
Compared to previous versions, PAC MC is backward compatible with all MF-MCTyre 1.x tire models, it generates the same output, and deals with all previous versions of MF-MCTyre property files.
In addition to PAC MC in Adams contains a more advanced tire-road contact modeling method that takes the tire's cross-section shape into account, which plays an important role at large inclination angles of the wheel with the road. Learn more about the tire cross-section profile contact method.
Modeling Tire-Road Interaction Forces
For vehicle dynamics applications, accurate knowledge of tire-road interaction forces is inevitable because the movements of a vehicle primarily depend on the road forces on the tires. These interaction forces depend on both road and tire properties and the motion of the tire with respect to the road.
In the radial direction, the MF tire models consider the tire to behave as a parallel linear spring and linear damper with one point of contact with the road surface. The contact point is determined by considering the tire and wheel as a rigid disc. In the contact point between the tire and the road the contact forces in longitudinal and lateral direction strongly depend on the slip between the tire patch elements and the road.
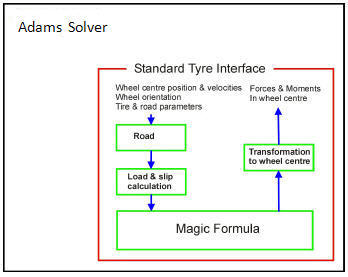
The figure, Input and Output Variables of the Magic Formula Tire Model, presents the input and output vectors of the PAC MC tire model. The tire model subroutine is linked to the Adams Solver through the Standard Tire Interface (STI) ([3]). The input through the STI consists of the:
■Position and velocities of the wheel center
■Orientation of the wheel
■Tire model (MF) parameters
■Road parameters
The tire model routine calculates the vertical load and slip quantities based on the position and speed of the wheel with respect to the road. The input for the Magic Formula consists of the wheel load  , the longitudinal and lateral slip
, the longitudinal and lateral slip  , and inclination angle
, and inclination angle  with the road. The output is the forces
with the road. The output is the forces  , and moments
, and moments  in the contact point between the tire and the road. For calculating these forces, the MF equations use a set of MF parameters, which are derived from tire testing data.
in the contact point between the tire and the road. For calculating these forces, the MF equations use a set of MF parameters, which are derived from tire testing data.
, the longitudinal and lateral slip , and inclination angle with the road. The output is the forces , and moments in the contact point between the tire and the road. For calculating these forces, the MF equations use a set of MF parameters, which are derived from tire testing data.The forces and moments out of the Magic Formula are transferred to the wheel center and returned to Adams Solver through the STI.
Input and Output Variables of the Magic Formula Tire Model
Axis Systems and Slip Definitions
Axis System
The PAC MC model is linked to Adams Solver using the TYDEX STI conventions as described in the TYDEX-Format [2] and the STI [3].
The STI interface between the PAC MC model and Adams Solver mainly passes information to the tire model in the C-axis coordinate system. In the tire model itself, a conversion is made to the W-axis system because all the modeling of the tire behavior, as described in this help, assumes to deal with the slip quantities, orientation, forces, and moments in the contact point with the TYDEX W-axis system. Both axis systems have the ISO orientation but have a different origin as can be seen in the figure below.
TYDEX C- and W-Axis Systems Used in PAC MC, Source[2]
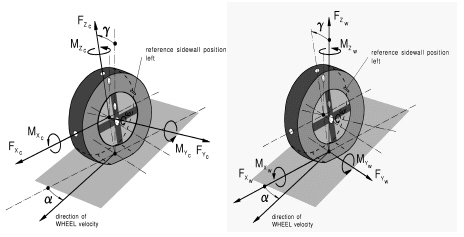
The C-axis system is fixed to the wheel carrier with the longitudinal xc-axis parallel to the road and in the wheel plane (xc-zc-plane). The origin of the C-axis system is the wheel center.
The origin of the W-axis system is the road contact-point defined by the intersection of the wheel plane, the plane through the wheel carrier, and the road tangent plane.
The forces and moments calculated by PAC MC using the MF equations in this guide are in the W-axis system. A transformation is made in the source code to return the forces and moments through the STI to Adams Solver.
The inclination angle is defined as the angle between the wheel plane and the normal to the road tangent plane (xw-yw-plane).
Units
The units of information transferred through the STI between Adams Solver and PAC MC are according to the SI unit system. Also, the equations for PAC MC described in this guide have been developed for use with SI units, although you can easily switch to another unit system in your tire property file. Because of the non-dimensional parameters, only a few parameters have units to be changed.
However, the parameters in the tire property file must always be valid for the TYDEX W-axis system (ISO oriented). The basic SI units are listed in the table below (also see Definitions).
SI Units Used in PAC MC
Variable Type: | Name: | Abbreviation: | Unit: |
|---|---|---|---|
Angle | Slip angle Inclination angle |   | Radian |
Force | Longitudinal force Lateral force Vertical load |    | Newton |
Moment | Overturning moment Rolling resistance moment Self-aligning moment |    | Newton.meter |
Speed | Longitudinal speed Lateral speed Longitudinal slip speed Lateral slip speed |     | Meters per second |
Rotational speed | Tire rolling speed |  | Radian per second |
Definition of Tire Slip Quantities
Slip Quantities at Combined Cornering and Braking/Traction
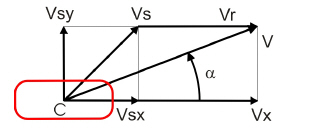
The longitudinal slip velocity  in the contact point (W-axis system, see the figure, Slip Quantities at Combined Cornering) is defined using the longitudinal speed
in the contact point (W-axis system, see the figure, Slip Quantities at Combined Cornering) is defined using the longitudinal speed  , the wheel rotational velocity
, the wheel rotational velocity  , and the effective rolling radius
, and the effective rolling radius  :
:
in the contact point (W-axis system, see the figure, Slip Quantities at Combined Cornering) is defined using the longitudinal speed , the wheel rotational velocity , and the effective rolling radius : | (1) |
The lateral slip velocity is equal to the lateral speed in the contact point with respect to the road plane:
 | (2) |
The practical slip quantities  (longitudinal slip) and
(longitudinal slip) and  (slip angle) are calculated with these slip velocities in the contact point with:
(slip angle) are calculated with these slip velocities in the contact point with:
(longitudinal slip) and (slip angle) are calculated with these slip velocities in the contact point with: | (3) |
 | (4) |
The rolling speed Vr is determined using the effective rolling radius Re:
 | (5) |
Contact-Methods and Normal Load Calculation
Contact Methods
The PAC-MC tire model supports the following contact methods.
■One Point Follower Contact, used by default for 2D Road, 3D Spline Road, OpenCRG Road and RGR Road.
■3D Equivalent Volume Contact, used by default for 3D Shell Road.
■Tire Cross-Section Profile Contact Method, which is best contact method for this tire model, because it takes into account the effect of the tire cross section shape on the contact point location. The Tire Cross-section Profile Contact can be used with 2D Road, 3D Spline Road, OpenCRG Road and RGR Road. This contact method is used, when a section [SECTION_PROFILE_TABLE] with tire cross section shape data is found in the tire property file.
In vertical direction, the PAC-MC tire is modeled as a parallel spring and damper. The spring deflection and damper velocity are derived with the (effective) road height and plane information supplied by the contact method.
The normal load  of the tire is calculated with the tire deflection as follows:
of the tire is calculated with the tire deflection as follows:
of the tire is calculated with the tire deflection as follows: | (6) |
Using this formula, the vertical tire stiffness increases due to increasing rotational speed  and decreases by longitudinal and lateral tire forces. If qFz1 and qFz2 are zero, qFz1 will be defined as CzR0/Fz0.
and decreases by longitudinal and lateral tire forces. If qFz1 and qFz2 are zero, qFz1 will be defined as CzR0/Fz0.
and decreases by longitudinal and lateral tire forces. If qFz1 and qFz2 are zero, qFz1 will be defined as CzR0/Fz0.Parameter qRE0 corrects for possible differences in between the specified unloaded radius (R0) and the measured radius in tire testing.
When you do not provide the coefficients qV2, qFcx, qFcy, qFz1, qFz2 and qFz3 in the tire property file, the normal load calculation is compatible with previous versions of PAC2002, because, in that case, the normal load is calculated using the linear vertical tire stiffness Cz and tire damping Kz according to:
 | (7) |
where is the tire deflection and is the deflection rate of the tire.
To take into account the effect of the tire cross-section profile, you can choose a more advanced method (see the Tire Cross Section Profile Contact Method).
Instead of the linear vertical tire stiffness Cz, also an arbitrary tire deflection - load curve can be defined in the tire property file in the section [DEFLECTION_LOAD_CURVE]. If a section called [DEFLECTION_LOAD_CURVE] exists, the load deflection datapoints with a cubic spline for inter- and extrapolation are used for the calculation of the vertical force of the tire. Note that you must specify in the tire property file, but it does not play any role.
in the tire property file, but it does not play any role.
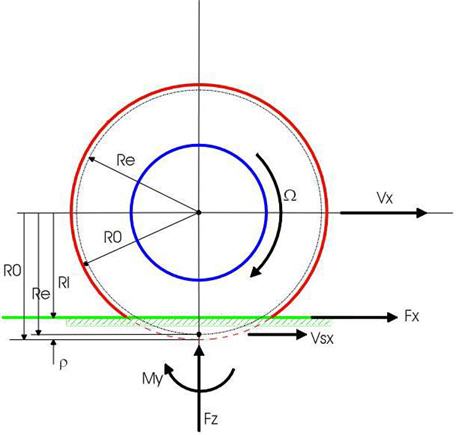
in the tire property file, but it does not play any role.Loaded and Effective Tire Rolling Radius
With the loaded tire radius Rl defined as the distance of the wheel center to the contact point of the tire with the road, the tire deflection can be calculated using the free tire radius R0 and a correction for the tire radius growth due to the rotational tire speed  :
:
:  | (8) |
The effective rolling radius Re (at free rolling of the tire), which is used to calculate the rotational speed of the tire, is defined by:
 | (9) |
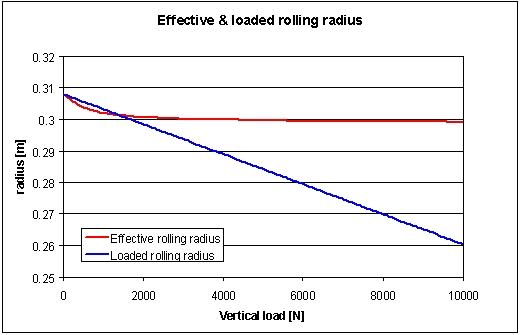
For radial tires, the effective rolling radius is rather independent of load in its load range of operation because of the high stiffness of the tire belt circumference. Only at low loads does the effective tire radius decrease with increasing vertical load due to the tire tread thickness. See the figure below.
Effective Rolling Radius and Longitudinal Slip
To represent the effective rolling radius Re, a MF-type of equation is used:
 | (10) |
in which  Fz0 is the nominal tire deflection:
Fz0 is the nominal tire deflection:
Fz0 is the nominal tire deflection: | (11) |
and  is called the dimensionless radial tire deflection, defined by:
is called the dimensionless radial tire deflection, defined by:
is called the dimensionless radial tire deflection, defined by: | (12) |
Example of Loaded and Effective Tire Rolling Radius as Function of Vertical Load
Normal Load and Rolling Radius Parameters
Name: | Name Used in Tire Property File: | Explanation: |
|---|---|---|
Fz0 | FNOMIN | Nominal wheel load |
Ro | UNLOADED_RADIUS | Free tire radius |
BReff | BREFF | Low load stiffness effective rolling radius |
qREO | QREO | Correction factor for measured unloaded radius |
DReff | DREFF | Peak value of effective rolling radius |
FReff | FREFF | High load stiffness effective rolling radius |
Cz | VERTICAL_STIFFNESS | Tire vertical stiffness (if qFz1=0) |
Kz | VERTICAL_DAMPING | Tire vertical damping |
qFz1 | QFZ1 | Tire vertical stiffness coefficient (linear) |
qFz2 | QFZ2 | Tire vertical stiffness coefficient (quadratic) |
qFz3 | QFZ3 | Camber dependency of the tire vertical stiffness |
qFcx1 | QFCX1 | Tire stiffness interaction with Fx |
qFcy1 | QFCY1 | Tire stiffness interaction with Fy |
qFc  1 1 | QFCG1 | Tire stiffness interaction with camber |
qV1 | QV1 | Tire radius growth coefficient |
qV2 | QV2 | Tire stiffness variation coefficient with speed |
Basics of the Magic Formula in PAC MC
The Magic Formula is a mathematical formula that is capable of describing the basic tire characteristics for the interaction forces between the tire and the road under several steady-state operating conditions. We distinguish:
■Pure cornering slip conditions: cornering with a free rolling tire
■Pure longitudinal slip conditions: braking or driving the tire without cornering
■Combined slip conditions: cornering and longitudinal slip simultaneously
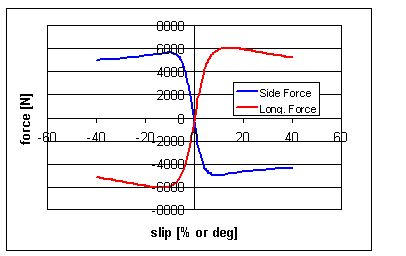
For pure slip conditions, the lateral force Fy as a function of the lateral slip  , respectively, and the longitudinal force Fx as a function of longitudinal slip
, respectively, and the longitudinal force Fx as a function of longitudinal slip , have a similar shape (see the figure, Characteristic Curves for Fx and Fy Under Pure Slip Conditions). Because of the sine - arctangent combination, the basic Magic Formula example is capable of describing this shape:
, have a similar shape (see the figure, Characteristic Curves for Fx and Fy Under Pure Slip Conditions). Because of the sine - arctangent combination, the basic Magic Formula example is capable of describing this shape:
, respectively, and the longitudinal force Fx as a function of longitudinal slip, have a similar shape (see the figure, Characteristic Curves for Fx and Fy Under Pure Slip Conditions). Because of the sine - arctangent combination, the basic Magic Formula example is capable of describing this shape: | (13) |
where Y(x) is either Fx with x the longitudinal slip , or Fy and x the lateral slip
, or Fy and x the lateral slip .
.
, or Fy and x the lateral slip.Characteristic Curves for Fx and Fy Under Pure Slip Conditions
The self-aligning moment  is calculated as a product of the lateral force Fy and the pneumatic trail t added with the residual moment
is calculated as a product of the lateral force Fy and the pneumatic trail t added with the residual moment . In fact, the aligning moment is due to the offset of lateral force Fy, called pneumatic trail t, from the contact point. Because the pneumatic trail t as a function of the lateral slip
. In fact, the aligning moment is due to the offset of lateral force Fy, called pneumatic trail t, from the contact point. Because the pneumatic trail t as a function of the lateral slip  has a cosine shape, a cosine version the Magic Formula is used:
has a cosine shape, a cosine version the Magic Formula is used:
is calculated as a product of the lateral force Fy and the pneumatic trail t added with the residual moment. In fact, the aligning moment is due to the offset of lateral force Fy, called pneumatic trail t, from the contact point. Because the pneumatic trail t as a function of the lateral slip has a cosine shape, a cosine version the Magic Formula is used: | (14) |
in which Y(x) is the pneumatic trail t as function of slip angle  .
.
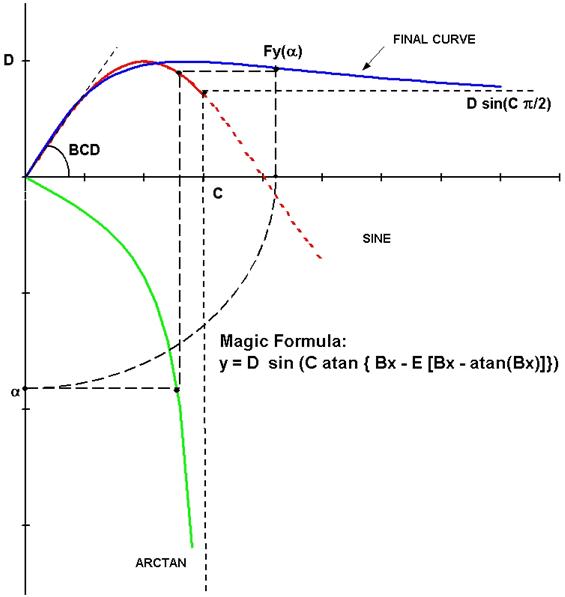
.The figure, The Magic Formula and the Meaning of Its Parameters, illustrates the functionality of the B, C, D, and E factor in the Magic Formula:
■D-factor determines the peak of the characteristic, and is called the peak factor.
■C-factor determines the part used of the sine and, therefore, mainly influences the shape of the curve (shape factor).
■B-factor stretches the curve and is called the stiffness factor.
■E-factor can modify the characteristic around the peak of the curve (curvature factor).
The Magic Formula and the Meaning of Its Parameters
In combined slip conditions, the lateral force decreases due to longitudinal slip or the opposite, the longitudinal force
decreases due to longitudinal slip or the opposite, the longitudinal force decreases due to lateral slip. The forces and moments in combined slip conditions are based on the pure slip characteristics multiplied by the so-called weighting functions. Again, these weighting functions have a cosine-shaped MF examples.
decreases due to lateral slip. The forces and moments in combined slip conditions are based on the pure slip characteristics multiplied by the so-called weighting functions. Again, these weighting functions have a cosine-shaped MF examples.
decreases due to longitudinal slip or the opposite, the longitudinal forcedecreases due to lateral slip. The forces and moments in combined slip conditions are based on the pure slip characteristics multiplied by the so-called weighting functions. Again, these weighting functions have a cosine-shaped MF examples.The Magic Formula itself only describes steady-state tire behavior. For transient tire behavior (up to 8 Hz), the MF output is used in a stretched string model that considers tire belt deflections instead of slip velocities to cope with standstill situations (zero speed).
Inclination Effects in the Lateral Force
From a historical point of view, the basic Magic Formulas have always been developed for car and truck tires, which cope with inclinations angles of not more than 10 degrees. To be able to describe the effects at large inclinations, an extension of the basic Magic Formula for the lateral force Fy has been developed. A contribution of the inclination  has also been added within the MF sine function:
has also been added within the MF sine function:
has also been added within the MF sine function: | (15) |
This elegant formulation has the advantage of an explicit definition of the camber stiffness, because this results now in:
 | (16) |
Input Variables
The input variables to the Magic Formula are:
Input Variables
Longitudinal slip |  | [-] |
Slip angle |  | [rad] |
Inclination angle |  | [rad] |
Normal wheel load | Fz | [N] |
Output Variables
Its output variables are:
Output Variables
Longitudinal force | Fx | [N] |
Lateral force | Fy | [N] |
Overturning couple | Mx | [Nm] |
Rolling resistance moment | My | [Nm] |
Aligning moment | Mz | [Nm] |
The output variables are defined in the W-axis system of TYDEX.
Basic Tire Parameters
All tire model parameters of the model are without dimension. The reference parameters for the model are:
Name | Name used in tire property file | Unit | Explanation |
|---|---|---|---|
Fz0 | FNOMIN | [N] | Nominal (rated) load |
R0 | UNLOADED_RADIUS | [m] | Unloaded tire radius |
pi0 | IP_NOM | [Pa] | Nominal inflation pressure |
pi | IP | [Pa] | Actual inflation pressure |
As a measure for the vertical load, the normalized vertical load increment dfz is used:
 | (17) |
with the possibly adapted nominal load (using the user-scaling factor,  ):
):
): | (18) |
Similarly the normalized inflation pressure dpi is defined as:
 | (19) |
With the user scaling factor for the inflation pressure:
 | (20) |
Nomenclature of the Tire Model Parameters
In the subsequent sections, formulas are given with non-dimensional parameters aijk with the following logic:
Tire Model Parameters
Parameter: | Definition: | |
|---|---|---|
a = | p | Force at pure slip |
q | Moment at pure slip | |
r | Force at combined slip | |
s | Moment at combined slip | |
i = | B | Stiffness factor |
C | Shape factor | |
D | Peak value | |
E | Curvature factor | |
K | Slip stiffness = BCD | |
H | Horizontal shift | |
V | Vertical shift | |
s | Moment at combined slip | |
t | Transient tire behavior | |
j = | x | Along the longitudinal axis |
y | Along the lateral axis | |
z | About the vertical axis | |
k = | 1, 2, ... | |
User Scaling Factors
A set of scaling factors is available to easily examine the influence of changing tire properties without the need to change one of the real Magic Formula coefficients. The default value of these factors is 1. You can change the factors in the tire property file. The peak friction scaling factors, λμx and λμy, are also used for the position-dependent friction in 3D Road Contact and Adams 3D Road. An overview of all scaling factors is shown in the next tables.
Scaling Factor Coefficients for Pure Slip
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
 | LFZO | Scale factor of nominal (rated) load |
 | LIP | Scale factor of nominal inflation pressure |
 | LCX | Scale factor of Fx shape factor |
λμx | LMUX | Scale factor of Fx peak friction coefficient |
 | LEX | Scale factor of Fx curvature factor |
 | LKX | Scale factor of Fx slip stiffness |
 | LVX | Scale factor of Fx vertical shift |
 | LGAX | Scale factor of camber for Fx |
 | LCY | Scale factor of Fy shape factor |
 | LMUY | Scale factor of Fy peak friction coefficient |
 | LEY | Scale factor of Fy curvature factor |
 | LKY | Scale factor of Fy cornering stiffness |
 | LCC | Scale factor of camber shape factor |
 | LKC | Scale factor of camber stiffness (K-factor) |
 | LEC | Scale factor of camber curvature factor |
 | LHY | Scale factor of Fy horizontal shift |
 | LGAY | Scale factor of camber force stiffness |
 | LTR | Scale factor of peak of pneumatic trail |
 | LRES | Scale factor for offset of residual torque |
 | LGAZ | Scale factor of camber torque stiffness |
 | LMX | Scale factor of overturning couple |
 | LVMX | Scale factor of Mx vertical shift |
 | LMY | Scale factor of rolling resistance torque |
Scaling Factor Coefficients for Combined Slip
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
 | LXAL | Scale factor of alpha influence on Fx |
 | LYKA | Scale factor of alpha influence on Fx |
 | LVYKA | Scale factor of kappa induced Fy |
 | LS | Scale factor of Moment arm of Fx |
Scaling Factor Coefficients for Transient Response
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
 | LSGKP | Scale factor of relaxation length of Fx |
 | LSGAL | Scale factor of relaxation length of Fy |
 | LGYR | Scale factor of gyroscopic moment |
Steady-State: Magic Formula for PAC MC
Steady-State Pure Slip
Formulas for the Longitudinal Force at Pure Slip
For the tire rolling on a straight line with no slip angle, the formulas are:
 | (21) |
 | (22) |
 | (23) |
 | (24) |
with following coefficients:
 | (25) |
 | (26) |
 | (27) |
 | (28) |
the longitudinal slip stiffness:
 | (29) |
 | (30) |
 | (31) |
 | (32) |
Longitudinal Force Coefficients at Pure Slip
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
pCx1 | PCX1 | Shape factor Cfx for longitudinal force |
pDx1 | PDX1 | Longitudinal friction Mux at Fznom |
pDx2 | PDX2 | Variation of friction Mux with load |
pDx3 | PDX3 | Variation of friction Mux with camber |
pEx1 | PEX1 | Longitudinal curvature Efx at Fznom |
pEx2 | PEX2 | Variation of curvature Efx with load |
pEx3 | PEX3 | Variation of curvature Efx with load squared |
pEx4 | PEX4 | Factor in curvature Efx while driving |
pKx1 | PKX1 | Longitudinal slip stiffness Kfx/Fz at Fznom |
pKx2 | PKX2 | Variation of slip stiffness Kfx/Fz with load |
pKx3 | PKX3 | Exponent in slip stiffness Kfx/Fz with load |
pVx1 | PVX1 | Vertical shift Svx/Fz at Fznom |
pVx2 | PVX2 | Variation of shift Svx/Fz with load |
ppx1 | PPX1 | Variation of slip stiffness Kfx/Fz with pressure |
ppx2 | PPX2 | Variation of slip stiffness Kfx/Fz with pressure squared |
ppx3 | PPX3 | Variation of friction Mux with pressure |
ppx4 | PPX4 | Variation of friction Mux with pressure squared |
Formulas for the Lateral Force at Pure Slip
 | (33) |
 | (34) |
 | (35) |
The scaled inclination angle:
 | (36) |
with coefficients:
 | (37) |
 | (38) |
 | (39) |
 | (40) |
The cornering stiffness:
 | (41) |
 | (42) |
 | (43) |
 | (44) |
 | (45) |
and the explicit camber stiffness:
 | (46) |
 | (47) |
 | (48) |
Lateral Force Coefficients at Pure Slip
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
pCy1 | PCY1 | Shape factor Cfy for lateral forces |
pCy2 | PCY2 | Shape factor Cfc for camber forces |
pDy1 | PDY1 | Lateral friction Muy |
pDy2 | PDY2 | Exponent lateral friction Muy |
pDy3 | PDY3 | Variation of friction Muy with squared camber |
pEy1 | PEY1 | Lateral curvature Efy at Fznom |
pEy2 | PEY2 | Variation of curvature Efy with camber squared |
pEy3 | PEY3 | Asymmetric curvature Efy at Fznom |
pEy4 | PEY4 | Asymmetric curvature Efy with camber |
pEy5 | PEY5 | Camber curvature Efc |
pKy1 | PKY1 | Maximum value of stiffness Kfy/Fznom |
pKy2 | PKY2 | Curvature of stiffness Kfy |
pKy3 | PKY3 | Peak stiffness factor |
pKy4 | PKY4 | Peak stiffness variation with camber squared |
pKy5 | PKY5 | Lateral stiffness dependency with camber squared |
pKy6 | PKY6 | Camber stiffness factor Kfc |
pKy7 | PKY7 | Vertical load dependency of camber stiffness Kfc |
pHy1 | PHY1 | Horizontal shift Shy at Fznom |
ppy1 | PPY1 | Variation of max. stiffness Kfy/Fznom with pressure |
ppy2 | PPY2 | Variation of load at max. Kfy with pressure |
ppy3 | PPY3 | Variation of friction Muy with pressure |
ppy4 | PPY4 | Variation of friction Muy with pressure squared |
ppy5 | PPY5 | Variation of camber stiffness with pressure |
Formulas for the Aligning Moment at Pure Slip

 | (49) |
with the pneumatic trail t:
 | (50) |
 | (51) |
and the residual moment Mzr:
 | (52) |
 | (53) |
The scaled inclination angle:
 | (54) |
with coefficients:
 | (55) |
 | (56) |
 | (57) |
 | (58) |
 | (59) |
 | (60) |
 | (61) |
 | (62) |
 | (63) |
 | (64) |
An approximation for the aligning moment stiffness reads:
 | (65) |
Aligning Moment Coefficients at Pure Slip
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
qBz1 | QBZ1 | Trail slope factor for trail Bpt at Fznom |
qBz2 | QBZ2 | Variation of slope Bpt with load |
qBz3 | QBZ3 | Variation of slope Bpt with load squared |
qBz4 | QBZ4 | Variation of slope Bpt with camber |
qBz5 | QBZ5 | Variation of slope Bpt with absolute camber |
qBz9 | QBZ9 | Slope factor Br of residual torque Mzr |
qCz1 | QCZ1 | Shape factor Cpt for pneumatic trail |
qDz1 | QDZ1 | Peak trail Dpt = Dpt*(Fz/Fznom*R0) |
qDz2 | QDZ2 | Variation of peak Dpt with load |
qDz3 | QDZ3 | Variation of peak Dpt with camber |
qDz4 | QDZ4 | Variation of peak Dpt with camber squared. |
qDz6 | QDZ6 | Peak residual moment Dmr = Dmr/ (Fz*R0) |
qDz7 | QDZ7 | Variation of peak factor Dmr with load |
qDz8 | QDZ8 | Variation of peak factor Dmr with camber |
qDz9 | QDZ9 | Variation of Dmr with camber and load |
qDz10 | QDZ10 | Variation of peak factor Dmr with camber squared |
qDz11 | QDZ11 | Variation of Dmr with camber squared and load |
qEz1 | QEZ1 | Trail curvature Ept at Fznom |
qEz2 | QEZ2 | Variation of curvature Ept with load |
qEz3 | QEZ3 | Variation of curvature Ept with load squared |
qEz4 | QEZ4 | Variation of curvature Ept with sign of Alpha-t |
qEz5 | QEZ5 | Variation of Ept with camber and sign Alpha-t |
qHz1 | QHZ1 | Trail horizontal shift Shr at Fznom |
qHz2 | QHZ2 | Variation of shift Shr with load |
qHz3 | QHZ3 | Variation of shift Shr with camber |
qHz4 | QHZ4 | Variation of shift Sht with camber and load |
qpz1 | QPZ1 | Variation of pneumatic trail peak with inflation pressure |
qpz2 | QPZ2 | Variation of Dmr with inflation pressure |
Steady-State Combined Slip
PAC-MC has two methods for calculating the combined slip forces and moments. If the user supplies the coefficients for the combined slip cosine 'weighing' functions, the combined slip is calculated according to Combined slip with cosine 'weighing' functions (standard method). If no coefficients are supplied, the so-called friction ellipse is used to estimate the combined slip forces and moments, see section Combined Slip with friction ellipse.
Combined slip with cosine 'weighing' functions
Formulas for the Longitudinal Force at Combined Slip
 | (66) |
with  the weighting function of the longitudinal force for pure slip.
the weighting function of the longitudinal force for pure slip.
the weighting function of the longitudinal force for pure slip.We write:
 | (67) |
 | (68) |
with coefficients:
 | (69) |
 | (70) |
 | (71) |
 | (72) |
 | (73) |
The weighting function follows as:
 | (74) |
Longitudinal Force Coefficients at Combined Slip
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
rBx1 | RBX1 | Slope factor for combined slip Fx reduction |
rBx2 | RBX2 | Variation of slope Fx reduction with kappa |
rBx3 | RBX3 | Influence of camber on stiffness for Fx reduction |
rCx1 | RCX1 | Shape factor for combined slip Fx reduction |
rEx1 | REX1 | Curvature factor of combined Fx |
rEx2 | REX2 | Curvature factor of combined Fx with load |
rHx1 | RHX1 | Shift factor for combined slip Fx reduction |
Formulas for Lateral Force at Combined Slip
 | (75) |
with Gyk the weighting function for the lateral force at pure slip and SVyk the ‘ -induced' side force; therefore, the lateral force can be written as:
-induced' side force; therefore, the lateral force can be written as:
-induced' side force; therefore, the lateral force can be written as: | (76) |
 | (77) |
with the coefficients:
 | (78) |
 | (79) |
 | (80) |
 | (81) |
 | (82) |
 | (83) |
 | (84) |
The weighting function appears is defined as:
 | (85) |
Lateral Force Coefficients at Combined Slip
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
rBy1 | RBY1 | Slope factor for combined Fy reduction |
rBy2 | RBY2 | Variation of slope Fy reduction with alpha |
rBy3 | RBY3 | Shift term for alpha in slope Fy reduction |
rBy4 | RBY4 | Camber dependency of Slope factor for combined Fy reduction |
rCy1 | RCY1 | Shape factor for combined Fy reduction |
rEy1 | REY1 | Curvature factor of combined Fy |
rEy2 | REY2 | Curvature factor of combined Fy with load |
rHy1 | RHY1 | Shift factor for combined Fy reduction |
rHy2 | RHY2 | Shift factor for combined Fy reduction with load |
rVy1 | RVY1 | Kappa-induced side force Svyk/Muy*Fz at Fznom |
rVy2 | RVY2 | Variation of Svyk/Muy*Fz with load |
rVy3 | RVY3 | Variation of Svyk/Muy*Fz with inclination |
rVy4 | RVY4 | Variation of Svyk/Muy*Fz with alpha |
rVy5 | RVY5 | Variation of Svyk/Muy*Fz with kappa |
rVy6 | RVY6 | Variation of Svyk/Muy*Fz with atan (kappa) |
Formulas for Aligning Moment at Combined Slip
 | (86) |
with:
 | (87) |
 | (88) |
 | (89) |
 | (90) |
 | (91) |
with the arguments:
 | (92) |
 | (93) |
Aligning Moment Coefficients at Combined Slip
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
ssz1 | SSZ1 | Nominal value of s/R0 effect of Fx on Mz |
ssz2 | SSZ2 | Variation of distance s/R0 with Fy/Fznom |
ssz3 | SSZ3 | Variation of distance s/R0 with inclination |
ssz4 | SSZ4 | Variation of distance s/R0 with load and inclination |
Formulas for Overturning Moment at Pure and Combined Slip
For the overturning moment, the formula reads both for pure and combined slip situations:
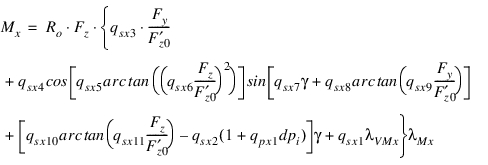 | (94) |
Overturning Moment Coefficients
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
qsx1 | QSX1 | Vertical offset overturning couple |
qsx2 | QSX2 | Inclination induced overturning couple |
qsx3 | QSX3 | Fy induced overturning couple |
qsx4 | QSX4 | Fz induced overturning couple due to lateral tire deflection |
qsx5 | QSX5 | Fz induced overturning couple due to lateral tire deflection |
qsx6 | QSX6 | Fz induced overturning couple due to lateral tire deflection |
qsx7 | QSX7 | Fz induced overturning couple due to lateral tire deflection by inclination |
qsx8 | QSX8 | Fz induced overturning couple due to lateral tire deflection by lateral force |
qsx9 | QSX9 | Fz induced overturning couple due to lateral tire deflection by lateral force |
qsx10 | QSX10 | Inclination induced overturning couple, load dependency |
qsx11 | QSX11 | load dependency inclination induced overturning couple |
qpx1 | QPX1 | Variation of camber effect with pressure |
Formulas for Rolling Resistance Moment at Pure and Combined Slip
The rolling resistance moment is defined by:
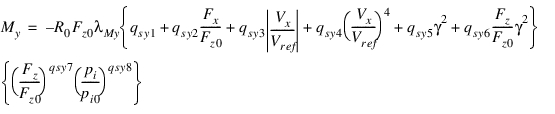 | (95) |
Rolling Resistance Coefficients
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
qsy1 | QSY1 | Rolling resistance moment coefficient |
qsy2 | QSY2 | Rolling resistance moment depending on Fx |
qsy3 | QSY3 | Rolling resistance moment depending on speed |
qsy4 | QSY4 | Rolling resistance moment depending on speed^4 |
qsy5 | QSY5 | Rolling resistance moment depending on camber |
qsy6 | QSY6 | Rolling resistance moment depending on camber and load |
qsy7 | QSY7 | Rolling resistance moment depending on load (exponential) |
qsy8 | QSY8 | Rolling resistance moment depending on inflation pressure |
Vref | LONGVL | Measurement speed |
Combined Slip with friction ellipse
In case the tire property file does not contain the coefficients for the 'standard' combined slip method (cosine 'weighing functions), the friction ellipse method is used, as described in this section.
Also the friction ellipse can be switched on by setting the keyword FE_METHOD in the [MODEL] section of the tire property file:
[MODEL]
FE_METHOD = 'YES'
Note that the method employed here is not part of one of the Magic Formula publications by Pacejka, but is an in-house development of MSC Software.
 | (96) |
 | (97) |
 | (98) |
 | (99) |
The following friction coefficients are defined:
 | (100) |
 | (101) |
 | (102) |
 | (103) |
The forces corrected for the combined slip conditions are:
 | (104) |
For aligning moment Mx, rolling resistance My and aligning moment Mz the formulae are used with  =0.
=0.
=0.Transient Behavior in PAC MC
The previous Magic Formula equations are valid for steady-state tire behavior. When driving, however, the tire requires some response time on changes of the inputs. In tire modeling terminology, the low-frequency behavior (up to 15 Hz) is called transient behavior. For modeling transient tire behavior PAC-MC provides two methods:
■Linear transient model (validity up to 8 Hz)
■Non linear transient model (validity up to 15 Hz)
In transient mode the tire model is able to deal with zero speed (stand-still). The more advanced non-linear transient mode shows better stand-still and tire spinning up performance.
In the linear transient model, the longitudinal and lateral tire stiffness at stand-still depend on the rolling tire slip stiffness properties, while in the non-linear model the stand-still stiffness values depend on the carcass and slip stiffness properties, which is more realistic.
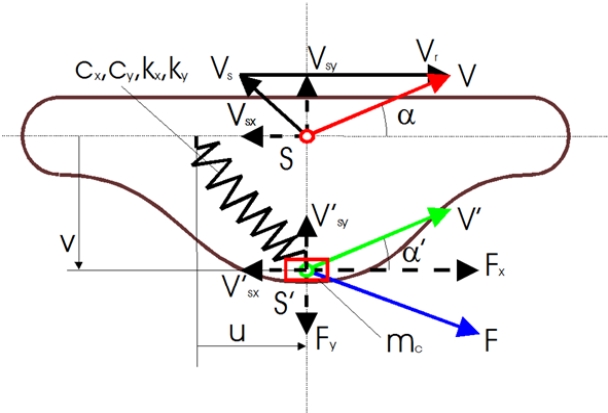
In this linear transient model the tire contact point S' is suspended to the wheel-rim plane with a longitudinal and lateral spring, with respectively stiffness's CFx and CFy, see reference [1]). In the figure below a top view of the tire with the single contact point S' and the longitudinal (u) and lateral (v) carcass deflections is shown.
Linear transient model
The contact point may move with respect to the wheel-rim plane and road. Movements relative to the road will result in tire-road interaction forces. Differences in slip velocities at point S and point S' will result in the tire carcass to deflect. The change of the longitudinal deflection u can be defined as:
 | (105) |
and the lateral deflection v as:
 | (106) |
For small values of slip the side force Fy can be calculated using the cornering stiffness CFα as follows:
 | (107) |
While the lateral force on the carcass reads:
 | (108) |
When introducing the lateral relaxation length σα as:
 | (109) |
the differential equation for the lateral deflection can be written as follows:
 | (110) |
For linear small slip we can define the practical slip quantity α' as:
 | (111) |
With α' the equation for the lateral deflection becomes:
 | (112) |
Similar the differential equation for longitudinal direction with the longitudinal relaxation length σκ can be derived:
 | (113) |
with the practical slip quantity 
 | (114) |
Both the longitudinal and lateral relaxation length are defined as of the vertical load:
 | (115) |
 | (116) |
Using these practical slip quantities,  and
and  , the Magic Formula examples can be used to calculate the tire-road interaction forces and moments:
, the Magic Formula examples can be used to calculate the tire-road interaction forces and moments:
and , the Magic Formula examples can be used to calculate the tire-road interaction forces and moments: | (117) |
 | (118) |
 | (119) |
 | (120) |
 | (121) |
With this linear transient model the effective lateral compliance of the tire at stand-still is
 | (122) |
And similar in longitudinal direction the compliance is:
 | (123) |
Coefficients of Linear Transient Model
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
pTx1 | PTX1 | Longitudinal relaxation length at Fznom |
pTx2 | PTX2 | Variation of longitudinal relaxation length with load |
pTx3 | PTX3 | Variation of longitudinal relaxation length with exponent of load |
pTy1 | PTY1 | Peak value of relaxation length for lateral direction |
pTy2 | PTY2 | Shape factor for lateral relaxation length |
Non linear transient model
The contact mass model is based on the separation of the contact patch slip properties and the tire carcass compliance (see reference [1). Instead of using relaxation lengths to describe compliance effects, the carcass springs are explicitly incorporated in the model. The contact patch is given some inertia to ensure computational causality. This modeling approach automatically accounts for the lagged response to slip and load changes that diminish at higher levels of slip. The contact patch itself uses relaxation lengths to handle simulations at low speed.
The contact patch can deflect in longitudinal, lateral, and yaw directions with respect to the lower part of the wheel rim. A mass is attached to the contact patch to enable straightforward computations. Note that the yaw deflection of the contact mass yaw β is not shown in the upper figure.
The differential equations that govern the dynamics of the contact patch body are:
 | (124) |
 | (125) |
 | (126) |
The contact patch body with mass mc and inertia Jc is connected to the wheel through springs cx, cy, and cψ and dampers kx, ky, and kψ in longitudinal, lateral, and yaw direction, respectively.
The additional equations for the longitudinal u, lateral v, and yaw β deflections are:
 | (127) |
 | (128) |
 | (129) |
in which Vcx, Vcy and  are the sliding velocity of the contact body in longitudinal, lateral, and yaw directions, respectively. Vsx, Vsy, and
are the sliding velocity of the contact body in longitudinal, lateral, and yaw directions, respectively. Vsx, Vsy, and  are the corresponding velocities of the lower part of the wheel.
are the corresponding velocities of the lower part of the wheel.
are the sliding velocity of the contact body in longitudinal, lateral, and yaw directions, respectively. Vsx, Vsy, and are the corresponding velocities of the lower part of the wheel.The transient slip equations for side slip, turn-slip, and camber are:
 | (130) |
 | (131) |
 | (132) |
 | (133) |
 | (134) |
 | (135) |
 | (136) |
where the calculated deflection angle has been used:
 | (137) |
The tire total spin velocity is:
 | (138) |
With the transient slip equations, the composite transient turn-slip quantities are calculated:
 | (139) |
 | (140) |
The tire forces are calculated with  and the tire moments with
and the tire moments with  .
.
and the tire moments with .The relaxation lengths are reduced with slip:
 | (141) |
 | (142) |
In which t0 is the pneumatic trail at zero slip angle.
 | (143) |
 | (144) |
 | (145) |
Here a is half the contact length according to:
 | (146) |
The composite tire parameter reads:
 | (147) |
and the equivalent slip  is calculated with the tire width b:
is calculated with the tire width b:
is calculated with the tire width b: | (148) |
With the contact relaxation length σc equal to half the contact length (a), this advanced non-linear model will yield an effective lateral compliance CFy of the tire at stand-still equal to:
 | (149) |
The effective tire relaxation length for lateral slip (at zero lateral slip) results in:
 | (150) |
Similarly following applies for longitudinal direction (at zero longitudinal slip):
 | (151) |
One advantage of the non-linear transient above the linear transient model is the dependency of relaxation to the amount of slip: if the slip increases, the relaxation will decrease, see the plot below:
In order to have a better agreement with measurement data the longitudinal and lateral stiffness can be defined to be a function of load and slip:
 | (152) |
 | (153) |
Coefficients of Non Linear Transient Model
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
mc | MC | Contact body mass |
Ic | IC | Contact body moment of inertia |
kx | KX | Longitudinal damping |
ky | KY | Lateral damping |
kψ | KP | Yaw damping |
cx | CX | Longitudinal stiffness |
cy | CY | Lateral stiffness |
cψ | CP | Yaw stiffness |
cxz1 | CXZ1 | Longitudinal stiffness linear dependency on load |
cxz2 | CXZ2 | Longitudinal stiffness quadratic dependency on load |
cxx1 | CXX1 | Longitudinal stiffness dependency on long. slip |
cyz1 | CYZ1 | Lateral stiffness linear dependency on load |
cyz2 | CYZ2 | Lateral stiffness quadratic dependency on load |
cyy1 | CYY1 | Lateral stiffness dependency on lat. slip |
pA1 | PA1 | Half contact length with vertical tire deflection |
pA2 | PA2 | Half contact length with square root of vertical tire deflection |
 | EP | Composite turn-slip (moment) |
 | EP12 | Composite turn-slip (moment) increment |
bF2 | BF2 | Second relaxation length factor |
bϕ1 | BP1 | First moment relaxation length factor |
bϕ2 | BP2 | Second moment relaxation length factor |
The remaining contact mass model parameters are estimated automatically based on longitudinal and lateral stiffness specified in the tire property file.
Gyroscopic Couple in PAC MC
When having fast rotations about the vertical axis in the wheel plane, the inertia of the tire belt may lead to gyroscopic effects. To cope with this additional moment, the following contribution is added to the total aligning moment:
 | (154) |
with the parameters (in addition to the basic tire parameter mbelt):
 | (155) |
and:
 | (156) |
The total aligning moment now becomes:
 | (157) |
Coefficients and Transient Response
Name: | Name used in tire property file: | Explanation: |
|---|---|---|
pTx1 | PTX1 | Relaxation length sigKap0/Fz at Fznom |
pTx2 | PTX2 | Variation of sigKap0/Fz with load |
pTx3 | PTX3 | Variation of sigKap0/Fz with exponent of load |
pTy1 | PTY1 | Peak value of relaxation length Sig_alpha |
pTy2 | PTY2 | Shape factor for lateral relaxation length |
pTy3 | PTY3 | Load where lateral relaxation is at maximum |
qTz1 | QTZ1 | Gyroscopic torque constant |
Mbelt | MBELT | Belt mass of the wheel |
Left and Right Side Tires
In general, a tire produces a lateral force and aligning moment at zero slip angle due to the tire construction, known as conicity and plysteer. In addition, the tire characteristics cannot be symmetric for positive and negative slip angles.
A tire property file with the parameters for the model results from testing with a tire that is mounted in a tire test bench comparable either to the left or the right side of a vehicle. If these coefficients are used for both the left and the right side of the vehicle model, the vehicle does not drive straight at zero steering wheel angle.
The latest versions of tire property files contain a keyword TYRESIDE in the [MODEL] section that indicates for which side of the vehicle the tire parameters in that file are valid (TIRESIDE = 'LEFT' or TIRESIDE = 'RIGHT').
If this keyword is available, Adams Car corrects for the conicity and plysteer and asymmetry when using a tire property file on the opposite side of the vehicle. In fact, the tire characteristics are mirrored with respect to slip angle zero.
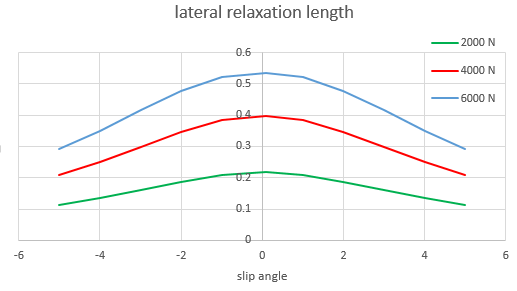
In Adams View this option can only be used when the tire is generated by the graphical user interface: select Build -> Forces -> Special Force: Tire (see figure of dialog box below).
Next to the LEFT and RIGHT side option of TYRESIDE, you can also select SYMMETRIC: then the tire characteristics are modified during initialization to show symmetric performance for left and right side corners and zero conicity and plysteer (no offsets). Also, when you set the tire property file to SYMMETRIC, the tire characteristics are changed to symmetric behavior.
Create Wheel and Tire Dialog Box in Adams View
USE_MODES of PAC MC: from Simple to Complex
The parameter USE_MODE in the tire property file allows you to switch the output of the PAC MC tire model from very simple (that is, steady-state cornering) to complex (transient combined cornering and braking).
The options for USE_MODE and the output of the model are listed in the table below.
USE_MODE Values of PAC MC and Related Tire Model Output
USE MODE: | State: | Slip conditions: | PAC MC output (forces and moments) |
|---|---|---|---|
0 | Steady state | Acts as a vertical spring and damper | 0, 0, Fz, 0, 0, 0 |
1 | Steady state | Pure longitudinal slip | Fx, 0, Fz, 0, My, 0 |
2 | Steady state | Pure lateral (cornering) slip | 0, Fy, Fz, Mx, 0, Mz |
3 | Steady state | Longitudinal and lateral (not combined) | Fx, Fy, Fz, Mx, My, Mz |
4 | Steady state | Combined slip | Fx, Fy, Fz, Mx, My, Mz |
11 | Transient | Pure longitudinal slip | Fx, 0, Fz, 0, My, 0 |
12 | Transient | Pure lateral (cornering) slip | 0, Fy, Fz, Mx, 0, Mz |
13 | Transient | Longitudinal and lateral (not combined) | Fx, Fy, Fz, Mx, My, Mz |
14 | Transient | Combined slip | Fx, Fy, Fz, Mx, My, Mz |
21 | Advanced transient | Pure longitudinal slip | Fx, 0, Fz, My, 0 |
22 | Advanced transient | Pure lateral (cornering) slip | 0, Fy, Fz, Mx, 0, Mz |
23 | Advanced transient | Longitudinal and lateral (not combined) | Fx, Fy, Fz, Mx, My, Mz |
24 | Advanced transient | Combined slip | Fx, Fy, Fz, Mx, My, Mz |
Contact Methods
The PAC MC model supports the following roads:
■2D Roads, see Adams Tire 2D Road Model
■3D Spline Roads, see Adams Tire 3D Spline Road Model
By default the PAC-MC uses a one point of contact model similar to all the other Adams Tire Handling models. However the PAC-MC has an option to take the tire cross section shape into account:
■3D Shell Roads, see Adams Tire 3D Shell Road Model
Tire Cross-Section Profile Contact Method
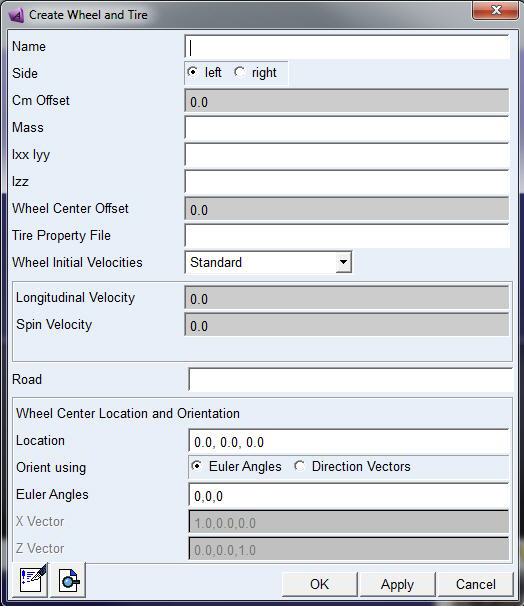
In combination with the 2D Road Model and the 3D Road Model, you can improve the tire-road contact calculation method by providing the tire's cross-section profile, which has an important influence on the wheel center height at large inclination angles with the road.
If the tire model reads a section called [SECTION_PROFILE_TABLE] in the tire property file, the cross section profile will be taken into account for the vertical load calculation of the tire. The method assumes that the tire deformation will not influence the position of the point with largest penetration (P), which is valid for motor cycle tires.
The vertical tire load Fz is calculated using the penetration (effpen =  ) of the tire through the tangent road plane in the point C, see Figure above, according to:
) of the tire through the tangent road plane in the point C, see Figure above, according to:
) of the tire through the tangent road plane in the point C, see Figure above, according to: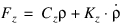 | (158) |
Because in this method the tangent to the cross section profile determines the point P, a high accuracy of the cross section profile is required. The section height y as function of the tire width x must be a continous and monotone increasing function. To avoid singularities and instability, it is highly recommended to fit measured cross section data with a polynom (for example y = a·x2 + b·x4 + c·x6 + ..) and provide the y cross section height data (y) from the polynom in the tire property file up to the maximum width of the tire. The profile is assumed to be symmetric with respect to the wheel plane.
Note that the PAC MC model has only one point of contact with the road; therefore, the wavelength of road obstacles must be longer than the tire radius for realistic output of the model. In addition, the contact force computed by this tire model is normal to the road plane. Therefore, the contact point does not generate a longitudinal force when rolling over a short obstacle, such as a cleat or pothole.
For ride and comfort analysis, we recommend more sophisticated tire models, such as Ftire.
Note: | When a [SECTION_PROFILE_TABLE] data block is found in a PAC_MC tire property file and a 3D shell road file is provided, this Tire Cross-Section Profile Contact Method is used, not the 3D equivalent volume contact. |
Quality Checks for the Tire Model Parameters
Because PAC MC uses an empirical approach to describe tire - road interaction forces, incorrect parameters can easily result in non-realistic tire behavior. Below is a list of the most important items to ensure the quality of the parameters in a tire property file:
Note: | Do not change Fz0 (FNOMIN) and R0 (UNLOADED_RADIUS) in your tire property file. It will change the complete tire characteristics because these two parameters are used to make all parameters without dimension. |
Camber (Inclination) Effects
Camber stiffness has been explicitly defined in PAC MC (see equation (43). For realistic tire behavior, the sign of the camber stiffness must be negative (TYDEX W-axis (ISO) system). If the sign is positive, the coefficients may not be valid for the ISO but for the SAE coordinate system. Note that PAC MC only uses coefficients for the TYDEX W-axis (ISO) system.
Effect of Positive Camber on the Lateral Force in TYDEX W-axis (ISO) System
The table below lists further checks on the PAC MC parameters.
Checklist for PAC MC Parameters and Properties
Parameter/property: | Requirement: | Explanation: |
|---|---|---|
LONGVL |  1 m/s 1 m/s | Reference velocity at which parameters are measured |
VXLOW | Approximately 1m/s | Threshold for scaling down forces and moments |
Dx |  0 0 | Peak friction (see equation (24)) |
pDx1/pDx2 |  0 0 | Peak friction Fx must decrease with increasing load |
Kx |  0 0 | Long slip stiffness (see equation (27)) |
Dy |  0 0 | Peak friction (see equation (36)) |
pDy1/pDy2 |  0 0 | Peak friction Fx must decrease with increasing load |
Ky |  0 0 | Cornering stiffness (see equation (39)) |
qsy1 |  0 0 | Rolling resistance, should in range of 0.005 - 0.015 |
 |  0 0 | Camber stiffness (see equation (43)) |
Validity Range of the Tire Model Input
In the tire property file, a range of the input variables has been given in which the tire properties are supposed to be valid. These validity range parameters are (the listed values can be different):
$---------------------------------------------------long_slip_range
[LONG_SLIP_RANGE]
KPUMIN = -1.5 $Minimum valid wheel slip
KPUMAX = 1.5 $Maximum valid wheel slip
$--------------------------------------------------slip_angle_range
[SLIP_ANGLE_RANGE]
ALPMIN = -1.5708 $Minimum valid slip angle
ALPMAX = 1.5708 $Maximum valid slip angle
$--------------------------------------------inclination_slip_range
[INCLINATION_ANGLE_RANGE]
CAMMIN = -1.0996 $Minimum valid camber angle
CAMMAX = 1.0996 $Maximum valid camber angle
$----------------------------------------------vertical_force_range
[VERTICAL_FORCE_RANGE]
FZMIN = 73.75 $Minimum allowed wheel load
FZMAX = 3319.5 $Maximum allowed wheel load
If one of the input parameters exceeds a minimum or maximum validity value, the calculation in the tire model will be performed with the minimum or maximum value of this range to avoid non-realistic tire behavior. In that case, a message appears warning you that one of the inputs exceeds a validity value.
Standard Tire Interface (STI) for PAC MC
Because all Adams products use the Standard Tire Interface (STI) for linking the tire models to Adams Solver, below is a brief background of the STI history (see reference [4]).
At the First International Colloquium on Tire Models for Vehicle Dynamics Analysis on October 21-22, 1991, the International Tire Workshop working group was established (TYDEX).
The working group concentrated on tire measurements and tire models used for vehicle simulation purposes. For most vehicle dynamics studies, people previously developed their own tire models. Because all car manufacturers and their tire suppliers have the same goal (that is, development of tires to improve dynamic safety of the vehicle), it aimed for standardization in tire behavior description.
In TYDEX, two expert groups, consisting of participants of vehicle industry (passenger cars and trucks), tire manufacturers, other suppliers and research laboratories, had been defined with following goals:
■The first expert group's (Tire Measurements - Tire Modeling) main goal was to specify an interface between tire measurements and tire models. The result was the TYDEX-Format [2] to describe tire measurement data.
■The second expert group's (Tire Modeling - Vehicle Modeling) main goal was to specify an interface between tire models and simulation tools, which resulted in the Standard Tire Interface (STI) [3]. The use of this interface should ensure that a wide range of simulation software can be linked to a wide range of tire modeling software.
Definitions
General
General Definitions
Term: | Definition: |
|---|---|
Road tangent plane | Plane with the normal unit vector (tangent to the road) in the tire-road contact point C. |
C-axis system | Coordinate system mounted on the wheel carrier at the wheel center according to TYDEX, ISO orientation. |
Wheel plane | The plane in the wheel center that is formed by the wheel when considered a rigid disc with zero width. |
Contact point C | Contact point between tire and road, defined as the intersection of the wheel plane and the projection of the wheel axis onto the road plane. |
W-axis system | Coordinate system at the tire contact point C, according to TYDEX, ISO orientation. |
Tire Kinematics
Tire Kinematics Definitions
Parameter: | Definition: | Units: |
|---|---|---|
R0 | Unloaded tire radius | [m] |
R | Loaded tire radius | [m] |
Re | Effective tire radius | [m] |
 | Radial tire deflection | [m] |
 | Dimensionless radial tire deflection | [-] |
 | Radial tire deflection at nominal load | [m] |
mbelt | Tire belt mass | [kg] |
 | Rotational velocity of the wheel | [radian-1] |
Slip Quantities
Slip Quantities Definitions
Parameter: | Definition: | Units: |
|---|---|---|
V | Vehicle speed | [ms-1] |
Vsx | Slip speed in x direction | [ms-1] |
Vsy | Slip speed in y direction | [ms-1] |
Vs | Resulting slip speed | [ms-1] |
Vx | Rolling speed in x direction | [ms-1] |
Vy | Lateral speed of tire contact center | [ms-1] |
Vr | Linear speed of rolling | [ms-1] |
 | Longitudinal slip | [-] |
 | Slip angle | [radian] |
 | Inclination angle | [radian] |
Forces and Moments
Force and Moment Definitions
Abbreviation: | Definition: | Units: |
|---|---|---|
Fz | Vertical wheel load | [N] |
Fz0 | Nominal load | [N] |
dfz | Dimensionless vertical load | [-] |
Fx | Longitudinal force | [N] |
Fy | Lateral force | [N] |
Mx | Overturning moment | [Nm] |
My | Braking/driving moment | [Nm] |
Mz | Aligning moment | [Nm] |
References
1. H.B. Pacejka, Tyre and Vehicle Dynamics, 2002, Butterworth-Heinemann, ISBN 0 7506 5141 5.
2. H.-J. Unrau, J. Zamow, TYDEX-Format, Description and Reference Manual, Release 1.1, Initiated by the International Tire Working Group, July 1995.
3. A. Riedel, Standard Tire Interface, Release 1.2, Initiated by the Tire Workgroup, June 1995.
4. J.J.M. van Oosten, H.-J. Unrau, G. Riedel, E. Bakker, TYDEX Workshop: Standardisation of Data Exchange in Tyre Testing and Tyre Modelling, Proceedings of the 2nd International Colloquium on Tyre Models for Vehicle Dynamics Analysis, Vehicle System Dynamics, Volume 27, Swets & Zeitlinger, Amsterdam/Lisse, 1996.
Example of PAC MC Tire Property File
[[MDI_HEADER]
FILE_TYPE ='tir'
FILE_VERSION =3.0
FILE_FORMAT ='ASCII'
! : TIRE_VERSION : PAC Motorcycle
! : COMMENT : Tire 180/55R17
! : COMMENT : Manufacturer
! : COMMENT : Nom. section with (m) 0.18
! : COMMENT : Nom. aspect ratio (-) 55
! : COMMENT : Infl. pressure (Pa) 200000
! : COMMENT : Rim radius (m) 0.216
! : COMMENT : Measurement ID
! : COMMENT : Test speed (m/s) 16.7
! : COMMENT : Road surface
! : COMMENT : Road condition Dry
! : FILE_FORMAT : ASCII
! : Copyright MSC Software, Mon Oct 20 10:46:57 2003
!
! USE_MODE specifies the type of calculation performed:
! 0: Fz only, no Magic Formula evaluation
! 1: Fx,My only
! 2: Fy,Mx,Mz only
! 3: Fx,Fy,Mx,My,Mz uncombined force/moment calculation
! 4: Fx,Fy,Mx,My,Mz combined force/moment calculation
! +10: including relaxation behaviour
! *-1: mirroring of tyre characteristics
!
! example: USE_MODE = -12 implies:! -calculation of Fy,Mx,Mz only! -including relaxation effects! -mirrored tyre characteristics
!
$---------------------------------------------------------------units
[UNITS]
LENGTH ='meter'
FORCE ='newton'
ANGLE ='radian'
MASS ='kg'
TIME ='second'
$---------------------------------------------------------------model
[MODEL]
PROPERTY_FILE_FORMAT ='PAC_MC' $Tire property type
USE_MODE = 14 $Tyre use switch (IUSED)
VXLOW = 1 $Below this speed forces are scaled down
LONGVL = 16.7 $Longitudinal speed during measurements
FE_METHOD = 'NO' $For switching to Friction ellipse for combined slip
TYRESIDE = 'SYMMETRIC' $Mounted side of tyre at vehicle/test bench
$----------------------------------------------------------dimensions
[DIMENSION]
UNLOADED_RADIUS = 0.322 $Free tyre radius
WIDTH = 0.18 $Nominal section width of the tyre
RIM_RADIUS = 0.216 $Nominal rim radius
RIM_WIDTH = 0.135 $Rim width
$------------------------------------------section_profile_table
[SECTION_PROFILE_TABLE]
{x y }
0.00000 0.0000000
0.00300 0.0000468
0.00600 0.0001877
0.00900 0.0004235
0.01200 0.0007561
0.01500 0.0011877
0.01800 0.0017216
0.02100 0.0023613
0.02400 0.0031114
0.02700 0.0039770
0.03000 0.0049639
0.03300 0.0060785
0.03600 0.0073282
0.03900 0.0087207
0.04200 0.0102646
0.04500 0.0119694
0.04800 0.0138449
0.05100 0.0159018
0.05400 0.0181517
0.05700 0.0206065
0.06000 0.0232793
0.06300 0.0261836
0.06600 0.0293337
0.06900 0.0327447
0.07200 0.0364323
0.07500 0.0404132
0.07800 0.0447047
0.08100 0.0493248
0.08400 0.0542923
0.08700 0.0596270
$----------------------------------------------------------load_curve
$ For a non-linear tire vertical stiffness
$ Maximum of 100 points
[DEFLECTION_LOAD_CURVE]
{pen fz}
0.000 0.0
0.001 212.0
0.002 428.0
0.003 648.0
0.005 1100.0
0.010 2300.0
0.020 5000.0
0.030 8100.0
$-----------------------------------------------------long_slip_range
[LONG_SLIP_RANGE]
KPUMIN = -1.5 $Minimum valid wheel slip
KPUMAX = 1.5 $Maximum valid wheel slip
$----------------------------------------------------slip_angle_range
[SLIP_ANGLE_RANGE]
ALPMIN = -1.5708 $Minimum valid slip angle
ALPMAX = 1.5708 $Maximum valid slip angle
$----------------------------------------------inclination_slip_range
[INCLINATION_ANGLE_RANGE]
CAMMIN = -1.0996 $Minimum valid camber angle
CAMMAX = 1.0996 $Maximum valid camber angle
$------------------------------------------------vertical_force_range
[VERTICAL_FORCE_RANGE]
FZMIN = 73.75 $Minimum allowed wheel load
FZMAX = 3319.5 $Maximum allowed wheel load
$-------------------------------------------------------------scaling
[SCALING_COEFFICIENTS]
LFZO = 1 $Scale factor of nominal load
LCX = 1 $Scale factor of Fx shape factor
LMUX = 1 $Scale factor of Fx peak friction coefficient
LEX = 1 $Scale factor of Fx curvature factor
LKX = 1 $Scale factor of Fx slip stiffness
LVX = 1 $Scale factor of Fx vertical shift
LGAX = 1 $Scale factor of camber for Fx
LCY = 1 $Scale factor of Fy shape factor
LMUY = 1 $Scale factor of Fy peak friction coefficient
LEY = 1 $Scale factor of Fy curvature factor
LKY = 1 $Scale factor of Fy cornering stiffness
LCC = 1 $Scale factor of camber shape factor
LKC = 1 $Scale factor of camber stiffness (K-factor)
LEC = 1 $Scale factor of camber curvature factor
LHY = 1 $Scale factor of Fy horizontal shift
LGAY = 1 $Scale factor of camber force stiffness
LTR = 1 $Scale factor of Peak of pneumatic trail
LRES = 1 $Scale factor of Peak of residual torque
LGAZ = 1 $Scale factor of camber torque stiffness
LXAL = 1 $Scale factor of alpha influence on Fx
LYKA = 1 $Scale factor of kappa influence on Fy
LVYKA = 1 $Scale factor of kappa induced Fy
LS = 1 $Scale factor of Moment arm of Fx
LSGKP = 1 $Scale factor of Relaxation length of Fx
LSGAL = 1 $Scale factor of Relaxation length of Fy
LGYR = 1 $Scale factor of gyroscopic torque
LMX = 1 $Scale factor of overturning couple
LVMX = 1 $Scale factor of Mx vertical shift
LMY = 1 $Scale factor of rolling resistance torque
$--------------------------------------------------------longitudinal
[LONGITUDINAL_COEFFICIENTS]
PCX1 = 1.7655 $Shape factor Cfx for longitudinal force
PDX1 = 1.2839 $Longitudinal friction Mux at Fznom
PDX2 =-0.0078226 $Variation of friction Mux with load
PDX3 = 0 $Variation of friction Mux with camber
PEX1 = 0.4743 $Longitudinal curvature Efx at Fznom
PEX2 = 9.3873e-005 $Variation of curvature Efx with load
PEX3 = 0.066154 $Variation of curvature Efx with load squared
PEX4 = 0.00011999 $Factor in curvature Efx while driving
PKX1 = 25.383 $Longitudinal slip stiffness Kfx/Fz at Fznom
PKX2 = 1.0978 $Variation of slip stiffness Kfx/Fz with load
PKX3 = 0.19775 $Exponent in slip stiffness Kfx/Fz with load
PVX1 = 2.1675e-005 $Vertical shift Svx/Fz at Fznom
PVX2 = 4.7461e-005 $Variation of shift Svx/Fz with load
RBX1 = 12.084 $Slope factor for combined slip Fx reduction
RBX2 = -8.3959 $Variation of slope Fx reduction with kappa
RBX3 = 2.1971e-009 $Influence of camber on stiffness for Fx combined
RCX1 = 1.0648 $Shape factor for combined slip Fx reduction
REX1 = 0.0028793 $Curvature factor of combined Fx
REX2 = -0.00037777 $Curvature factor of combined Fx with load
RHX1 = 0 $Shift factor for combined slip Fx reduction
PTX1 = 0.83 $Relaxation length SigKap0/Fz at Fznom
PTX2 = 0.42 $Variation of SigKap0/Fz with load
PTX3 = 0.21 $Variation of SigKap0/Fz with exponent of load
$---------------------------------------------------------overturning
[OVERTURNING_COEFFICIENTS]
QSX1 = 0 $Vertical offset overturning moment
QSX2 = 0.16056 $Camber induced overturning moment
QSX3 = 0.095298 $Fy induced overturning moment
$-------------------------------------------------------------lateral
[LATERAL_COEFFICIENTS]
PCY1 = 1.1086 $Shape factor Cfy for lateral forces
PCY2 = 0.66464 $Shape factor Cfc for camber forces
PDY1 = 1.3898 $Lateral friction Muy
PDY2 = -0.0044718 $Exponent lateral friction Muy
PDY3 = 0.21428 $Variation of friction Muy with squared camber
PEY1 = -0.80276 $Lateral curvature Efy at Fznom
PEY2 = 0.89416 $Variation of curvature Efy with camber squared
PEY3 = 0 $Asymmetric curvature Efy at Fznom
PEY4 = 0 $Asymmetric curvature Efy with camber
PEY5 = -2.8159 $Camber curvature Efc
PKY1 = -19.747 $Maximum value of stiffness Kfy/Fznom
PKY2 = 1.3756 $Curvature of stiffness Kfy
PKY3 = 1.3528 $Peak stiffness factor
PKY4 = -1.2481 $Peak stiffness variation with camber squared
PKY5 = 0.3743 $Lateral stiffness depedency with camber squared
PKY6 = -0.91343 $Camber stiffness factor Kfc
PKY7 = 0.2907 $Vertical load dependency of camber stiffn. Kfc
PHY1 = 0 $Horizontal shift Shy at Fznom
RBY1 = 10.694 $Slope factor for combined Fy reduction
RBY2 = 8.9413 $Variation of slope Fy reduction with alpha
RBY3 = 0 $Shift term for alpha in slope Fy reduction
RBY4 = -1.8256e-010 $Influence of camber on stiffness of Fy combined
RCY1 = 1.0521 $Shape factor for combined Fy reduction
REY1 = -0.0027402 $Curvature factor of combined Fy
REY2 = -0.0094269 $Curvature factor of combined Fy with load
RHY1 = -7.864e-005 $Shift factor for combined Fy reduction
RHY2 = -6.9003e-006 $Shift factor for combined Fy reduction with load
RVY1 = 0 $Kappa induced side force Svyk/Muy*Fz at Fznom
RVY2 = 0 $Variation of Svyk/Muy*Fz with load
RVY3 = -0.00033208 $Variation of Svyk/Muy*Fz with camber
RVY4 = -4.7907e+015 $Variation of Svyk/Muy*Fz with alpha
RVY5 = 1.9 $Variation of Svyk/Muy*Fz with kappa
RVY6 = -30.082 $Variation of Svyk/Muy*Fz with atan(kappa)
PTY1 = 0.75 $Peak value of relaxation length Sig_alpha
PTY2 = 1 $Shape factor for Sig_alpha
PTY3 = 0.6 $Value of Fz/Fznom where Sig_alpha is maximum
$--------------------------------------------------rolling resistance
[ROLLING_COEFFICIENTS]
QSY1 = 0.01 $Rolling resistance torque coefficient
QSY2 = 0 $Rolling resistance torque depending on Fx
QSY3 = 0 $Rolling resistance torque depending on speed
QSY4 = 0 $Rolling resistance torque depending on speed^4
$------------------------------------------------------------aligning
[ALIGNING_COEFFICIENTS]
QBZ1 = 9.246 $Trail slope factor for trail Bpt at Fznom
QBZ2 = -1.4442 $Variation of slope Bpt with load
QBZ3 = -1.8323 $Variation of slope Bpt with load squared
QBZ4 = 0 $Variation of slope Bpt with camber
QBZ5 = 0.15703 $Variation of slope Bpt with absolute camber
QBZ9 = 8.3146 $Slope factor Br of residual torque Mzr
QCZ1 = 1.2813 $Shape factor Cpt for pneumatic trail
QDZ1 = 0.063288 $Peak trail Dpt = Dpt*(Fz/Fznom*R0)
QDZ2 = -0.015642 $Variation of peak Dpt with load
QDZ3 = -0.060347 $Variation of peak Dpt with camber
QDZ4 = -0.45022 $Variation of peak Dpt with camber squared
QDZ6 = 0 $Peak residual torque Dmr = Dmr/(Fz*R0)
QDZ7 = 0 $Variation of peak factor Dmr with load
QDZ8 = -0.08525 $Variation of peak factor Dmr with camber
QDZ9 = -0.081035 $Variation of peak factor Dmr with camber and load
QDZ10 = 0.030766 $Variation of peak factor Dmr with camber squared
QDZ11 = 0.074309 $Variation of Dmr with camber squared and load
QEZ1 = -3.261 $Trail curvature Ept at Fznom
QEZ2 = 0.63036 $Variation of curvature Ept with load
QEZ3 = 0 $Variation of curvature Ept with load squared
QEZ4 = 0 $Variation of curvature Ept with sign of Alpha-t
QEZ5 = 0 $Variation of Ept with camber and sign Alpha-t
QHZ1 = 0 $Trail horizontal shift Sht at Fznom
QHZ2 = 0 $Variation of shift Sht with load
QHZ3 = 0 $Variation of shift Sht with camber
QHZ4 = 0 $Variation of shift Sht with camber and load
SSZ1 = 0 $Nominal value of s/R0: effect of Fx on Mz
SSZ2 = 0.0033657 $Variation of distance s/R0 with Fy/Fznom
SSZ3 = 0.16833 $Variation of distance s/R0 with camber
SSZ4 = 0.017856 $Variation of distance s/R0 with load and camber
QTZ1 = 0 $Gyroscopic torque constant
MBELT = 0 $Belt mass of the wheel -kg-